主要参考:
Linux Led 子系统-腾讯云开发者社区-腾讯云
LED 子系统简介
Linux 中的 LED 子系统(LED Subsystem) 是内核专门为 LED 设备设计的标准化框架,用于统一管理各类 LED 硬件(如 GPIO 控制的 LED、PWM 调光 LED、专用芯片驱动的 LED 等),并为用户空间提供一致的控制接口。
一、LED 子系统的核心目标
- 统一驱动模型:无论 LED 由何种硬件控制(GPIO、PWM、I2C 芯片等),都通过相同的内核接口抽象,简化驱动开发。
- 标准化用户接口:自动在
sysfs中创建控制节点(如/sys/class/leds/),用户空间无需关心硬件细节,直接通过文件操作控制 LED。- 支持通用功能:内置亮度调节、闪烁模式、触发机制(如 “心跳”“定时器”)等,避免重复开发。
二、核心数据结构:
struct led_classdev
led_classdev是 LED 子系统的核心结构体,封装了 LED 设备的属性和操作方法,定义在include/linux/leds.h中:struct led_classdev { const char *name; // LED 名称(对应 /sys/class/leds/ 下的目录名) enum led_brightness brightness; // 当前亮度(0 表示灭,255 表示最亮) enum led_brightness max_brightness; // 最大亮度(通常为 255) // 设置亮度的回调函数(驱动必须实现) void (*brightness_set)(struct led_classdev *led_cdev, enum led_brightness brightness); // 获取亮度的回调函数(可选) enum led_brightness (*brightness_get)(struct led_classdev *led_cdev); // 其他成员:闪烁控制、触发模式、设备指针等 };
- 亮度值:
enum led_brightness定义了亮度范围,LED_OFF(0)表示熄灭,LED_FULL(255)表示最亮,中间值可用于调光。- 核心回调:
brightness_set是驱动的核心函数,负责将用户设置的亮度值(如 255 或 0)转换为硬件操作(如 GPIO 电平切换、PWM 占空比调节)。三、LED 子系统的工作流程
1. 驱动开发流程
(1)定义并初始化
led_classdevstatic struct led_classdev my_led = { .name = "my_led", // 设备名称,对应 /sys/class/leds/my_led/ .max_brightness = LED_FULL, // 最大亮度 255 .brightness_set = my_led_set, // 自定义亮度设置函数 };(2)实现
brightness_set回调static void my_led_set(struct led_classdev *cdev, enum led_brightness brightness) { // 假设 LED 连接到 GPIO10,高电平点亮 if (brightness == LED_OFF) { gpio_set_value(10, 0); // 低电平→灭 } else { gpio_set_value(10, 1); // 高电平→亮 } }(3)注册 LED 设备
通过led_classdev_register注册设备,内核会自动在sys/class/leds/下创建控制节点:int ret = led_classdev_register(dev, &my_led); if (ret) { dev_err(dev, "LED 注册失败\n"); return ret; }2. 用户空间控制接口
注册成功后,
sys/class/leds/my_led/目录下会生成以下关键文件:
brightness:读写当前亮度(0 灭,255 亮)。echo 255 > /sys/class/leds/my_led/brightness # 点亮 echo 0 > /sys/class/leds/my_led/brightness # 熄灭max_brightness:只读,返回最大亮度(通常为 255)。trigger:设置 LED 触发模式(如 “心跳”“定时器”“键盘事件” 等)。echo heartbeat > /sys/class/leds/my_led/trigger # 心跳模式(亮灭交替) echo none > /sys/class/leds/my_led/trigger # 取消触发模式四、典型应用场景
- GPIO 控制的 LED:最常见的场景,通过 GPIO 电平切换控制亮灭(如开发板上的用户 LED)。内核已提供通用驱动
drivers/leds/leds-gpio.c,可直接通过设备树配置使用。- PWM 调光 LED:支持亮度渐变(如背光调节),通过 PWM 占空比控制亮度,对应驱动
drivers/leds/leds-pwm.c。- 触发模式:无需用户手动控制,LED 自动响应系统事件(如 “心跳” 模式指示系统运行,“disk-activity” 模式指示磁盘读写)。
五、优势与意义
- 简化驱动开发:驱动只需实现硬件相关的
brightness_set函数,其他通用功能(如sysfs节点创建、触发模式)由子系统自动处理。- 用户友好:提供统一的
sysfs接口,用户空间(应用程序、脚本)可直接控制,无需适配不同硬件。- 可扩展性:支持多 LED 实例、动态亮度调节、低功耗模式等,满足产品级需求。
总结
LED 子系统是 Linux 内核中管理 LED 设备的标准化框架,通过
led_classdev结构体抽象硬件差异,提供统一的驱动接口和用户空间控制方式。无论是简单的 GPIO LED 还是复杂的 PWM 调光 LED,都能通过该子系统快速实现符合内核规范的驱动,是产品级 LED 驱动开发的首选方案。
使用场景
在 Linux 系统中,是否直接使用内核自带的 LED 驱动(如
leds-gpio.c、leds-pwm.c等),还是需要自行编写驱动,主要取决于 硬件特性 和 功能需求。以下是具体判断标准:一、可以直接使用内核自带 LED 驱动的情况
当 LED 设备满足 “硬件简单、功能通用、符合内核驱动适配范围” 时,无需自定义驱动,直接使用内核自带驱动即可,典型场景包括:
GPIO 直接控制的普通 LED
- 硬件特点:LED 通过单个 GPIO 引脚控制(高 / 低电平点亮 / 熄灭),无特殊时序或外部电路依赖。
- 适用驱动:
leds-gpio.c(内核主线驱动)。- 使用方式:通过设备树配置 GPIO 引脚、有效电平(高 / 低)、默认状态等,驱动会自动匹配并生成
/sys/class/leds/控制接口。PWM 调光的 LED
- 硬件特点:LED 亮度通过 PWM 信号占空比调节(如背光 LED),依赖内核 PWM 子系统。
- 适用驱动:
leds-pwm.c(内核主线驱动)。- 使用方式:设备树中指定 PWM 控制器、通道及频率,驱动自动实现亮度与占空比的映射。
支持标准触发模式的场景
- 功能需求:仅需基础功能(亮 / 灭、亮度调节)或内核默认触发模式(如
heartbeat心跳、timer定时闪烁、disk-activity磁盘活动指示)。- 优势:无需编写代码,通过
sysfs接口(如/sys/class/leds/xxx/trigger)即可配置。硬件符合通用驱动的适配范围
- 若 LED 由内核已支持的专用芯片(如 I2C 接口的 PCA955x 系列 LED 控制器)驱动,且功能无需扩展,可直接使用对应的芯片驱动(如
leds-pca955x.c)。二、需要自行编写 LED 驱动的情况
当 LED 设备 “硬件复杂、功能特殊”,或通用驱动无法满足产品需求时,需自定义驱动,典型场景包括:
硬件控制方式特殊
- 非 GPIO/PWM 控制:如通过 SPI 接口的 LED 矩阵、需要特定时序的 RGB LED 驱动芯片(如 WS2812),通用驱动无法适配硬件协议。
- 复杂电路依赖:LED 需配合电源管理芯片、过流保护电路或多级放大电路工作,需在驱动中集成硬件初始化和状态检测逻辑。
功能需求超出通用驱动范围
- 自定义调光逻辑:如非线性亮度曲线(gamma 校正)、基于环境光传感器的自动亮度调节,需重写
brightness_set回调函数。- 复杂联动效果:如多 LED 同步实现流水灯、追逐动画,或 LED 与其他设备(如按键、传感器)的联动响应,通用驱动的单设备管理模式无法满足。
- 自定义触发模式:内核默认触发模式(如心跳、定时)无法满足需求(如 Morse 码闪烁、随音频波形变化),需在驱动中实现自定义触发逻辑。
产品级特性需求
- 电源管理优化:需在系统休眠 / 唤醒时精确控制 LED 状态(如休眠时关闭以省电,唤醒后恢复原亮度),需自定义
suspend/resume回调。- 权限与安全控制:LED 用于敏感场景(如工业报警灯),需限制用户空间访问权限(如仅 root 可操作),通用驱动的默认权限管理不足。
- 诊断与日志:需通过
sysfs/debugfs暴露硬件状态(如当前功耗、温度)或记录操作日志,便于问题排查。硬件或内核版本不兼容
- 旧内核适配:设备运行的内核版本过旧(如 3.x 以前),通用驱动缺失设备树支持或关键功能,需编写兼容旧接口的驱动。
- 特殊架构:非标准硬件平台(如专用 DSP)的 GPIO/PWM 控制器与通用驱动不兼容,需针对硬件重写控制逻辑。
总结
- 优先使用内核自带驱动:简单 GPIO/PWM 控制的 LED,功能需求为基础亮灭、调光或默认触发模式,硬件符合通用驱动适配范围。
- 必须自定义驱动:硬件控制方式特殊(非 GPIO/PWM、复杂电路)、功能需求超出通用范围(自定义调光 / 联动 / 触发),或需满足产品级特性(电源管理、权限控制等)。
自定义驱动时,建议基于 LED 子系统(
led_classdev)开发,以保持与内核框架的兼容性,仅聚焦于硬件交互和扩展功能的实现。
LED子系统框架
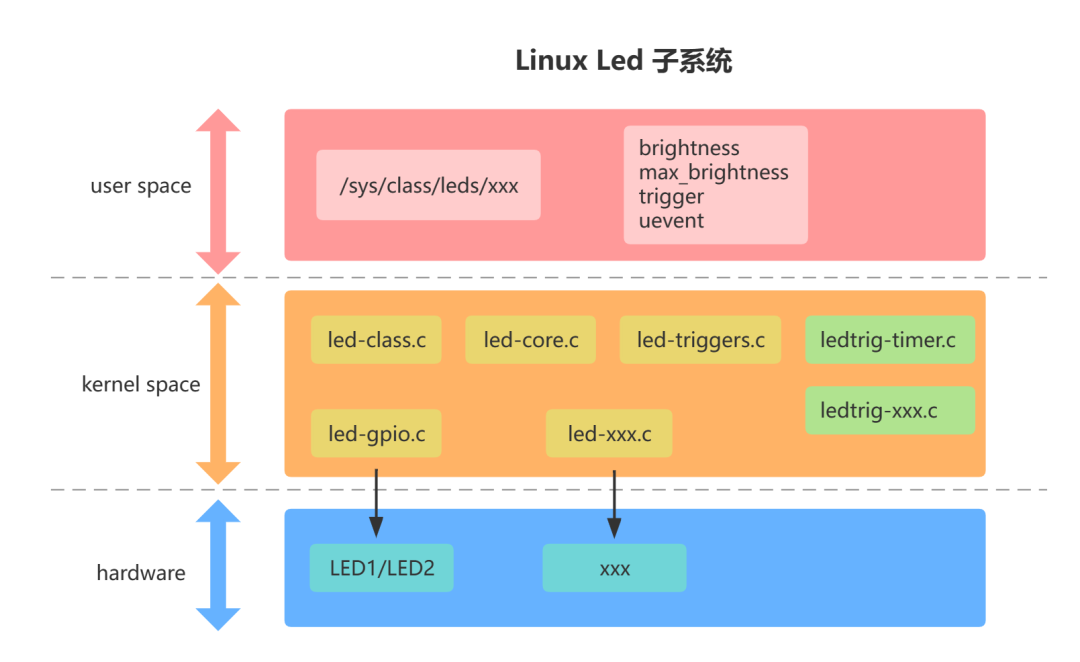
led 子系统驱动框架:
对应的目录文件如下:
led 子系统核心文件:
driver/leds/led-class.c driver/leds/led-core.c driver/leds/led-triggers.c include/linux/leds.h其他文件(按需)
driver/leds/led-gpio.c driver/leds/wm8350.c driver/leds/led-xxx.c driver/leds/trigger/ledtrig-backlight.c driver/leds/trigger/ledtrig-camera.c driver/leds/trigger/ledtrig-cpu.c driver/leds/trigger/ledtrig-default-on.c driver/leds/trigger/ledtrig-gpio.c driver/leds/trigger/ledtrig-heartbeat.c driver/leds/trigger/ledtrig-ide-disk.c driver/leds/trigger/ledtrig-multi-control.c driver/leds/trigger/ledtrig-oneshot.c driver/leds/trigger/ledtrig-timer.c driver/leds/trigger/ledtrig-transient.cled 子系统相关描述可在内核源码 Documentation/leds/leds-class.txt 了解。
代码框架分析
led-class.c (led 子系统框架的入口)
维护 LED 子系统的所有 LED 设备,为 LED 设备提供注册操作函数: led_classdev_register() devm_led_classdev_register() 注销操作函数: led_classdev_unregister() devm_led_classdev_unregister(); 电源管理的休眠和恢复操作函数: led_classdev_suspend() led_classdev_resume(); 用户态操作接口:brightness 、max_brightnessled-core.c
抽象出 LED 操作逻辑,封装成函数导出,供其它文件使用: led_init_core(): 核心初始化; led_blink_set(): 设置led闪烁时间: led_blink_set_oneshot() : 闪烁一次 led_stop_software_blink() : led停止闪烁 led_set_brightness() : 设置led的亮度 led_update_brightness : 更新亮度 led_sysfs_disable : 用户态关闭 led_sysfs enable : 用户态打开 leds_list : leds链表; leds_list_lock : leds链表锁led-triggers.c
维护 LED 子系统的所有触发器,为触发器提供注册操作函数: led_trigger_register() devm_led_trigger_register() led_trigger_register_simple() 注销操作函数: led_trigger_unregister() led_trigger_unregister_simple() 以及其它触发器相关的操作函数ledtrig-timer.c、ledtrig-xxx.c
以 ledtrig-timer.c 为例 入口函数调用 led_trigger_register() 注册触发器, 注册时候传入 led_trigger 结构体,里面有 activate 和 deactivate 成员函数指针, 作用是生成 delay_on 、 delay_off 文件 同时还提供 delay_on 和 delay_off 的用户态操作接口 卸载时,使用 led_trigger_unregister() 注销触发器leds-gpio.c、leds-xxx.c :
以 leds-gpio.c 为例 在通过设备树或者其它途径匹配到设备信息后,将调用 probe() 函数, 然后再根据设备信息设置 led_classdev, 最后调用 devm_led_classdev_register() 注册 LED 设备。led_classdev 结构体代表 led 实例:
struct led_classdev { const char *name;//名字 enum led_brightness brightness;//亮度 enum led_brightness max_brightness;//最大亮度 int flags; /* Lower 16 bits reflect status */ #define LED_SUSPENDED (1 << 0) /* Upper 16 bits reflect control information */ #define LED_CORE_SUSPENDRESUME (1 << 16) #define LED_BLINK_ONESHOT (1 << 17) #define LED_BLINK_ONESHOT_STOP (1 << 18) #define LED_BLINK_INVERT (1 << 19) #define LED_SYSFS_DISABLE (1 << 20) #define SET_BRIGHTNESS_ASYNC (1 << 21) #define SET_BRIGHTNESS_SYNC (1 << 22) #define LED_DEV_CAP_FLASH (1 << 23) //设置亮度API void (*brightness_set)(struct led_classdev *led_cdev,enum led_brightness brightness); int (*brightness_set_sync)(struct led_classdev *led_cdev,enum led_brightness brightness); //获取亮度API enum led_brightness (*brightness_get)(struct led_classdev *led_cdev); //闪烁时点亮和熄灭的时间设置 int (*blink_set)(struct led_classdev *led_cdev,unsigned long *delay_on,unsigned long *delay_off); struct device *dev; const struct attribute_group **groups; //leds-list的node struct list_head node; //默认trigger的名字 const char *default_trigger; //闪烁的开关时间 unsigned long blink_delay_on, blink_delay_off; //闪烁的定时器链表 struct timer_list blink_timer; //闪烁的亮度 int blink_brightness; void (*flash_resume)(struct led_classdev *led_cdev); struct work_struct set_brightness_work; int delayed_set_value; #ifdef CONFIG_LEDS_TRIGGERS //trigger的锁 struct rw_semaphore trigger_lock; //led的trigger struct led_trigger *trigger; //trigger的链表 struct list_head trig_list; //trigger的数据 void *trigger_data; bool activated; #endif struct mutex led_access; };led_trigger 结构:
struct led_trigger { /* Trigger Properties */ const char *name; void (*activate)(struct led_classdev *led_cdev); void (*deactivate)(struct led_classdev *led_cdev); /* LEDs under control by this trigger (for simple triggers) */ rwlock_t leddev_list_lock; struct list_head led_cdevs; /* Link to next registered trigger */ struct list_head next_trig; };trigger 是控制 LED 类设备的算法,这个算法决定着 LED 什么时候亮什么时候暗。
注意:
leds-gpio.c是 Linux 内核中一个具体的驱动程序,而非框架。它是基于 LED 子系统(LED Subsystem)框架实现的、专门用于控制 GPIO 连接的 LED 设备的驱动。明确概念:框架 vs 驱动
LED 子系统(框架):是内核提供的一套标准化接口和机制(核心是
struct led_classdev结构体及相关函数),定义了 LED 设备的抽象模型、用户空间接口(sysfs)和驱动开发规范。它是 “骨架”,不直接操作硬件,而是提供通用能力。
leds-gpio.c(驱动):是基于 LED 子系统框架编写的具体实现,负责将框架的抽象接口与实际硬件(GPIO 控制的 LED)对接。它实现了 LED 子系统要求的回调函数(如brightness_set),并通过 GPIO 子系统操作硬件引脚,完成 “亮 / 灭”“亮度调节” 等具体功能。
leds-gpio.c的核心作用
- 硬件适配:专门处理通过 GPIO 引脚控制的 LED(最常见的 LED 硬件形态),将 GPIO 电平操作(高 / 低电平)与 LED 子系统的亮度值(0~255)对应起来。
- 设备树解析:通过设备树获取 LED 对应的 GPIO 引脚、有效电平(高 / 低)、默认状态等硬件信息,无需硬编码。
- 标准化接口:基于 LED 子系统框架,自动创建
/sys/class/leds/下的控制节点,让用户空间可以通过统一的brightness、trigger等文件控制 LED。总结
- LED 子系统是框架,提供通用规范和接口;
leds-gpio.c是基于该框架的具体驱动,负责 GPIO 类型 LED 的硬件控制。类似地,内核中还有
leds-pwm.c(PWM 调光 LED 驱动)、leds-pca955x.c(I2C 芯片控制的 LED 驱动)等,它们都是基于 LED 子系统框架实现的具体驱动,分别适配不同硬件类型的 LED。
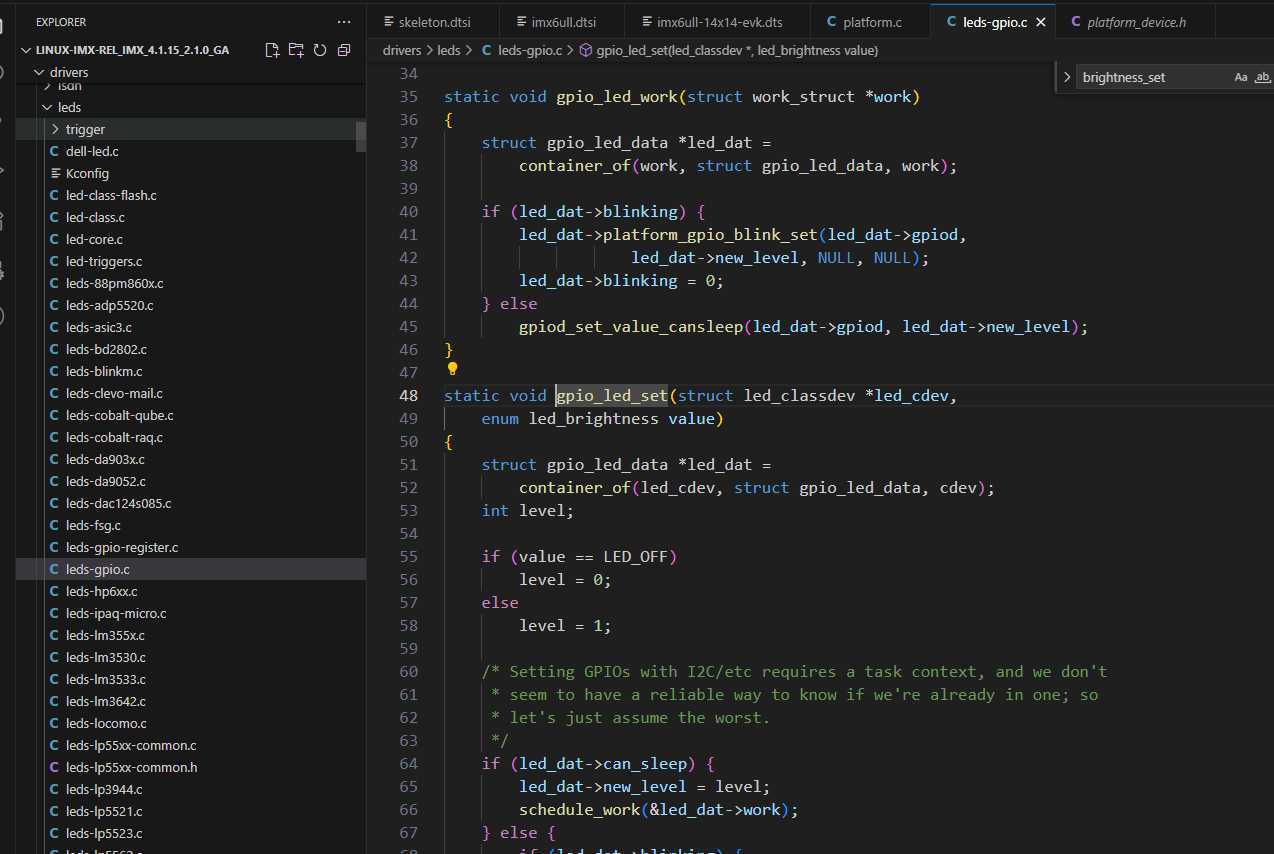
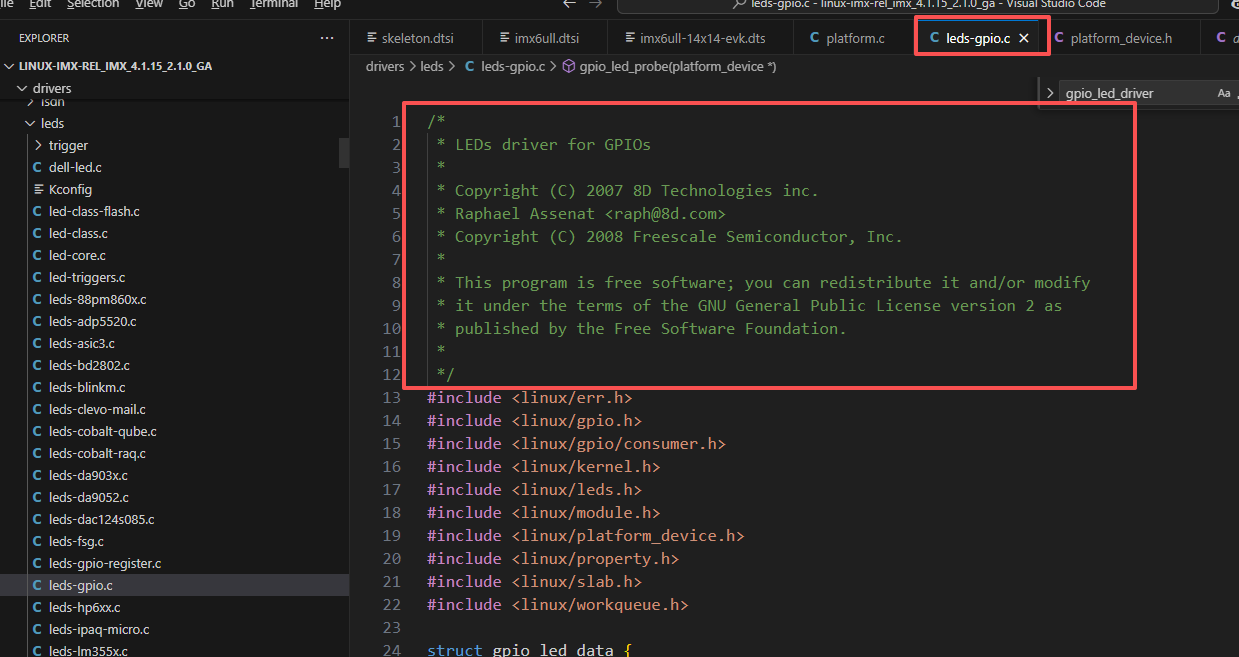
leds-gpio.c驱动实现
文件如下:
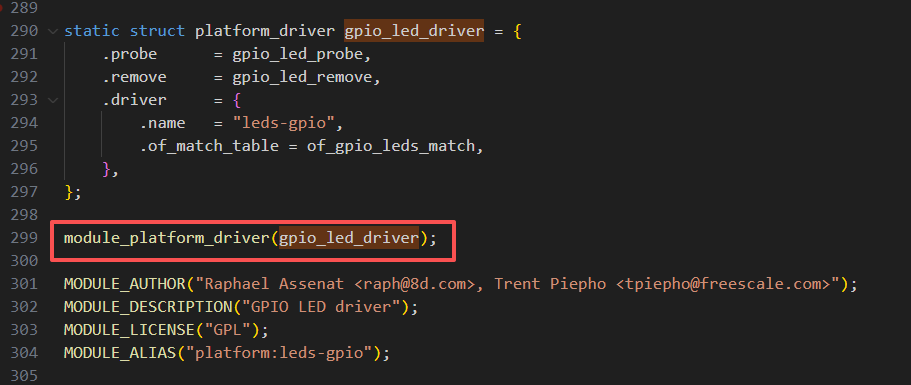
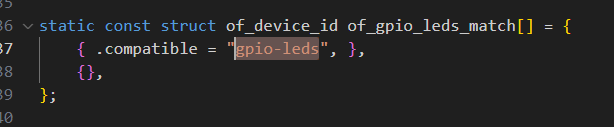
首先,该驱动使用了platform框架
可以看到,该驱动框架提供了基础的probe和remove函数,并且指定了驱动的name字段以及of_match_table匹配表。
当驱动和设备匹配时,就会触发probe函数
接下来重点关注下这个函数
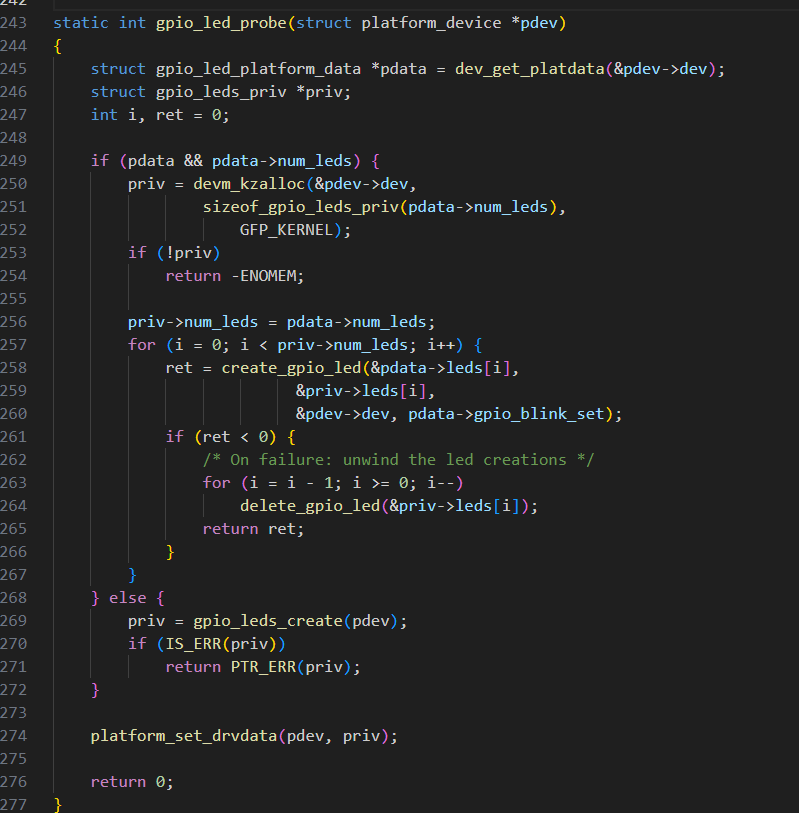
这段代码的核心逻辑是根据设备信息(平台数据或设备树)创建 LED 设备实例,并完成硬件初始化。
代码逐段解析:
1. 变量定义与平台数据获取
struct gpio_led_platform_data *pdata = dev_get_platdata(&pdev->dev); struct gpio_leds_priv *priv; int i, ret = 0;
pdata:获取平台设备的私有数据(struct gpio_led_platform_data类型),包含 LED 数量、每个 LED 的配置等信息。priv:驱动私有数据结构体指针(struct gpio_leds_priv),用于存储驱动运行时的状态(如 LED 数量、每个 LED 的具体数据)。2. 处理传统平台数据(非设备树)的情况
if (pdata && pdata->num_leds) { priv = devm_kzalloc(&pdev->dev, sizeof_gpio_leds_priv(pdata->num_leds), GFP_KERNEL); if (!priv) return -ENOMEM; priv->num_leds = pdata->num_leds; for (i = 0; i num_leds; i++) { ret = create_gpio_led(&pdata->leds[i], &priv->leds[i], &pdev->dev, pdata->gpio_blink_set); if (ret = 0; i--) delete_gpio_led(&priv->leds[i]); return ret; } } }
- 条件判断:当设备通过传统平台数据(非设备树)配置时(
pdata存在且包含 LED 数量),进入此分支。- 内存分配:通过
devm_kzalloc分配priv结构体内存,其中包含一个柔性数组leds[],大小由sizeof_gpio_leds_priv计算(结构体固定部分 + 每个 LED 数据的大小 × 数量)。- 初始化每个 LED:循环调用
create_gpio_led初始化每个 LED,包括申请 GPIO 资源、注册 LED 设备到系统等。- 错误处理:若某个 LED 初始化失败,回滚已创建的 LED(调用
delete_gpio_led),避免资源泄漏。3. 处理设备树配置的情况
else { priv = gpio_leds_create(pdev); if (IS_ERR(priv)) return PTR_ERR(priv); }
- 条件判断:当没有传统平台数据时(通常是设备树配置的情况),进入此分支。
- 从设备树创建 LED:
gpio_leds_create函数会解析设备树中 LED 相关的节点(如gpio、label、default-trigger等属性),并完成与上述分支类似的初始化工作。- 错误处理:若设备树解析或初始化失败,通过
IS_ERR判断错误并返回。4. 保存私有数据并返回
platform_set_drvdata(pdev, priv); return 0;
platform_set_drvdata:将priv指针与平台设备绑定,方便后续在remove等函数中通过platform_get_drvdata获取。- 返回 0 表示
probe成功,设备初始化完成。核心作用总结:
gpio_led_probe函数是leds-gpio驱动的入口,负责:
- 兼容两种设备配置方式:传统平台数据(
platform_data)和设备树(Device Tree)。- 为每个 LED 分配资源并初始化硬件(如申请 GPIO、设置初始状态)。
- 将 LED 设备注册到内核 LED 子系统,生成用户空间控制接口(
/sys/class/leds/)。- 通过
devm_*系列函数管理内存,确保设备卸载时资源自动释放。这一实现体现了 Linux 驱动的兼容性设计(同时支持传统平台数据和设备树)和可靠性原则(错误回滚、自动资源管理)。
gpio_leds_create
如下:
这段代码是
leds-gpio驱动中用于从设备树解析 LED 配置并创建 LED 设备的核心函数。当驱动通过设备树匹配设备时(而非传统platform_data方式),会调用该函数完成 LED 设备的初始化。代码核心逻辑解析:
1. 函数作用
gpio_leds_create的主要功能是:
- 解析设备树中 LED 控制器节点的子节点(每个子节点对应一个具体 LED);
- 从子节点中读取硬件配置(如 GPIO 引脚、默认状态、触发器等);
- 为每个 LED 创建对应的软件结构并初始化硬件;
- 最终返回包含所有 LED 信息的私有数据结构体。
2. 逐段解析
(1)初始化与计数子节点
struct device *dev = &pdev->dev; struct fwnode_handle *child; struct gpio_leds_priv *priv; int count, ret; struct device_node *np; count = device_get_child_node_count(dev); // 获取设备树中子节点数量(即 LED 数量) if (!count) return ERR_PTR(-ENODEV); // 无 LED 子节点,返回错误
count:统计设备树中当前 LED 控制器节点下的子节点数量(每个子节点代表一个 LED)。- 若没有子节点,说明没有 LED 配置,返回错误。
(2)分配私有数据内存
priv = devm_kzalloc(dev, sizeof_gpio_leds_priv(count), GFP_KERNEL); if (!priv) return ERR_PTR(-ENOMEM);
- 使用
devm_kzalloc分配gpio_leds_priv结构体(含柔性数组leds[]),大小由 LED 数量count决定。- 内存与设备
dev绑定,设备销毁时自动释放。(3)遍历设备树子节点(每个子节点对应一个 LED)
device_for_each_child_node(dev, child) { // 遍历所有 LED 子节点 struct gpio_led led = {}; // 临时存储单个 LED 的配置 const char *state = NULL; // 用于存储默认状态("on"/"off"/"keep") // ... 解析子节点属性并填充 led 结构体 }
device_for_each_child_node:遍历设备树中当前节点的所有子节点(每个子节点描述一个 LED 的硬件信息)。(4)解析子节点属性并初始化 LED 配置
① 获取 LED 对应的 GPIO 引脚
led.gpiod = devm_get_gpiod_from_child(dev, NULL, child); if (IS_ERR(led.gpiod)) { fwnode_handle_put(child); ret = PTR_ERR(led.gpiod); goto err; }
devm_get_gpiod_from_child:从子节点中解析gpios属性(如gpios = <&gpio1 3 GPIO_ACTIVE_HIGH>),获取 GPIO 描述符gpiod(用于后续操作 GPIO)。- 若获取失败,跳转至错误处理。
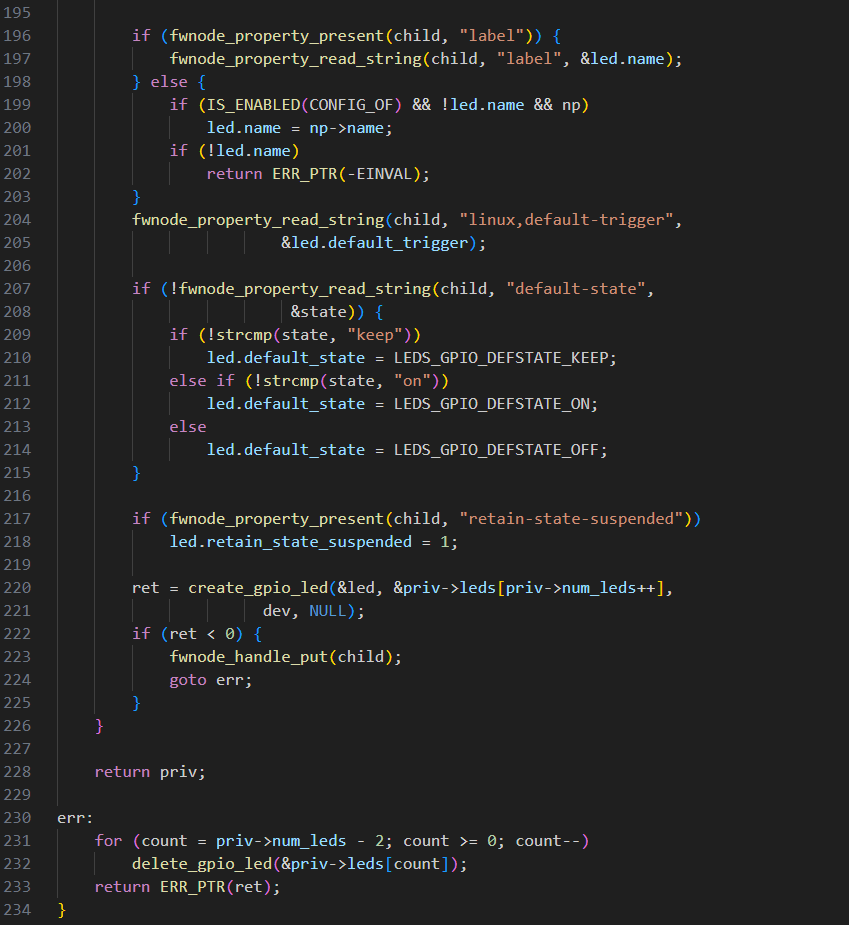
② 解析 LED 名称(
label属性)if (fwnode_property_present(child, "label")) { fwnode_property_read_string(child, "label", &led.name); // 优先读 label 属性 } else { if (IS_ENABLED(CONFIG_OF) && !led.name && np) led.name = np->name; // 无 label 则用节点名 if (!led.name) return ERR_PTR(-EINVAL); // 名称为空则错误 }
- 优先从子节点的
label属性读取 LED 名称(如label = "user-led")。- 若没有
label,则使用设备树节点名作为默认名称。③ 解析默认触发器(
linux,default-trigger属性)fwnode_property_read_string(child, "linux,default-trigger", &led.default_trigger);
- 读取
linux,default-trigger属性(如linux,default-trigger = "heartbeat"),设置 LED 的默认触发方式(如心跳模式、定时器模式等)。④ 解析默认状态(
default-state属性)if (!fwnode_property_read_string(child, "default-state", &state)) { if (!strcmp(state, "keep")) led.default_state = LEDS_GPIO_DEFSTATE_KEEP; // 保持当前状态 else if (!strcmp(state, "on")) led.default_state = LEDS_GPIO_DEFSTATE_ON; // 默认点亮 else led.default_state = LEDS_GPIO_DEFSTATE_OFF; // 默认熄灭 }
- 读取
default-state属性("on"/"off"/"keep"),设置 LED 初始化时的默认状态。⑤ 解析休眠时状态保持属性(
retain-state-suspended)if (fwnode_property_present(child, "retain-state-suspended")) led.retain_state_suspended = 1; // 标记休眠时保持当前状态
- 若子节点有
retain-state-suspended属性,设置标志位,表明设备休眠时保持 LED 当前状态。(5)创建 LED 设备并添加到私有数据
ret = create_gpio_led(&led, &priv->leds[priv->num_leds++], dev, NULL); if (ret < 0) { fwnode_handle_put(child); goto err; }
create_gpio_led:根据解析出的led配置,创建 LED 设备(注册到内核 LED 子系统,生成/sys/class/leds/接口)。- 将创建的 LED 信息存入私有数据
priv的柔性数组leds[]中,并递增计数器num_leds。(6)错误处理
err: for (count = priv->num_leds - 2; count >= 0; count--) delete_gpio_led(&priv->leds[count]); // 回滚:删除已创建的 LED return ERR_PTR(ret);
- 若某个 LED 创建失败,遍历已创建的 LED 并调用
delete_gpio_led销毁,避免资源泄漏。总结
gpio_leds_create是设备树模式下初始化 GPIO LED 的核心函数,其工作流程可概括为:
- 统计设备树中 LED 子节点数量;
- 分配存储所有 LED 信息的私有数据内存;
- 逐个解析子节点的硬件属性(GPIO、名称、状态等);
- 为每个 LED 创建设备实例并注册到系统;
- 错误时回滚已创建的资源,保证系统稳定性。
该函数体现了 Linux 驱动中 “设备树解析 → 硬件配置 → 设备注册” 的标准流程,通过设备树实现了硬件信息与驱动代码的解耦。

fwnode_开头的这些函数是啥?
fwnode_开头的函数是 Linux 内核中用于操作固件节点(firmware node) 的通用接口,主要作用是统一处理不同类型的硬件描述信息(如设备树节点、ACPI 设备节点等),实现驱动代码对多种固件描述方式的兼容。1. 什么是「固件节点(fwnode)」?
在 Linux 中,硬件设备的描述方式不止设备树(Device Tree)一种,还包括 ACPI(Advanced Configuration and Power Interface,主要用于 x86 平台)等。为了让驱动代码能同时支持这些不同的固件描述方式,内核抽象出了「固件节点(fwnode)」的概念:
- 设备树中的节点(
struct device_node)是一种 fwnode;- ACPI 中的设备节点(
struct acpi_device)也是一种 fwnode;fwnode_handle是所有类型固件节点的「通用句柄」,驱动通过它可以操作任何类型的固件节点,无需关心底层是设备树还是 ACPI。2.
fwnode_*函数的核心作用
fwnode_*系列函数是一套通用接口,用于读取、判断固件节点的属性,无论底层是设备树还是 ACPI,驱动都可以用相同的函数获取硬件信息,从而实现「一套驱动代码兼容多种固件描述方式」。例如:
- 设备树用
label = "user-led"描述 LED 名称;- ACPI 可能用其他方式描述同一属性;
- 驱动通过
fwnode_property_read_string()可以统一读取这个名称,无需区分是设备树还是 ACPI。3. 常用
fwnode_*函数及示例结合你之前看到的
gpio_leds_create函数,以下是几个高频使用的fwnode_*函数:(1)
fwnode_property_present()
- 功能:判断固件节点是否包含某个属性。
- 示例:
// 判断节点是否有 "retain-state-suspended" 属性 if (fwnode_property_present(child, "retain-state-suspended")) { led.retain_state_suspended = 1; // 有则设置标志位 }(2)
fwnode_property_read_string()
- 功能:从固件节点读取字符串类型的属性(如
label、default-state)。- 示例:
const char *state; // 读取 "default-state" 属性的值(如 "on"/"off") if (!fwnode_property_read_string(child, "default-state", &state)) { // 处理读取到的字符串 }(3)
device_for_each_child_node()
- 功能:遍历一个设备的所有子固件节点(类似设备树中遍历子节点)。
- 示例:
struct fwnode_handle *child; // 遍历设备 dev 的所有子固件节点(如遍历所有 LED 子节点) device_for_each_child_node(dev, child) { // 处理每个子节点(如解析属性、初始化设备) }(4)
fwnode_handle_put()
- 功能:释放固件节点句柄的引用(类似
kfree,但针对 fwnode)。- 示例:
if (IS_ERR(led.gpiod)) { fwnode_handle_put(child); // 释放子节点句柄 return PTR_ERR(led.gpiod); }4. 与设备树专用函数的关系
设备树有一套专用的操作函数(如
of_property_read_string、of_get_child_count),而fwnode_*函数是这些函数的超集:
- 当底层是设备树时,
fwnode_*函数会自动调用对应的of_*函数(如fwnode_property_read_string→of_property_read_string);- 当底层是 ACPI 时,
fwnode_*函数会调用 ACPI 专用函数;- 驱动使用
fwnode_*函数后,无需修改代码即可在设备树和 ACPI 平台上运行。总结
fwnode_*函数是 Linux 内核为兼容多种固件描述方式(设备树、ACPI 等)而设计的通用接口,核心价值是统一硬件信息的读取方式,让驱动代码摆脱对特定固件类型的依赖,实现跨平台兼容。在支持设备树的驱动中,这些函数通常用于解析节点属性(如label、gpios等),是现代 Linux 驱动开发的标准用法。
of_node函数
在 Linux 内核设备树(Device Tree)框架中,
of_node()是一个专用的类型转换函数,核心作用是将通用固件节点句柄(struct fwnode_handle) 转换为设备树特有的节点结构(struct device_node),以便访问设备树节点的专属属性和功能。1. 先明确两个核心结构体的关系
要理解
of_node(),必须先理清其操作的两个核心结构体的层级:
结构体 定位与作用 struct fwnode_handle通用固件节点句柄:内核抽象的「通用容器」,可代表任何固件类型的节点(如设备树、ACPI),不包含某类固件的专属信息。 struct device_node设备树专用节点结构:仅用于描述设备树中的节点,包含设备树特有的成员(如节点名称 name、父节点指针parent、属性列表properties等)。关键关系:
struct device_node是struct fwnode_handle的「具体实现」—— 设备树节点在内存中存储时,会在struct device_node内部嵌入一个struct fwnode_handle成员(作为通用句柄对外暴露)。
形象理解:struct device_node是 “完整的设备树节点”,struct fwnode_handle是它对外提供的 “通用接口名片”,of_node()就是通过 “名片” 找到 “完整的人”。2.
of_node()的核心实现
of_node()的实现非常简洁,本质是通过container_of宏(内核常用的结构体成员反向查找宏),从fwnode_handle成员的地址反推出整个struct device_node的地址。其内核源码(简化版)如下:
#include // 设备树相关头文件 static inline struct device_node *of_node(struct fwnode_handle *fwnode) { // 仅当 fwnode 是设备树节点的通用句柄时,转换才有效 if (!fwnode || fwnode->type != FWNODE_OF) return NULL; // 通过 fwnode_handle 成员,反向获取包含它的 device_node 结构体地址 return container_of(fwnode, struct device_node, fwnode); }
container_of(ptr, type, member):内核宏,作用是 “已知结构体type中的成员member的地址ptr,反推出整个type结构体的首地址”。fwnode->type != FWNODE_OF:安全检查,确保传入的fwnode确实是设备树类型的节点(避免对 ACPI 等其他固件节点误转换)。3.
of_node()的使用场景
of_node()仅在需要从通用固件节点访问设备树专属功能时使用,最典型的场景是:当驱动代码通过通用的fwnode_*接口拿到节点句柄后,需要进一步获取设备树节点的特有信息(如节点名称、父节点等)。结合你之前提供的代码示例,就能清晰看到其用途:
// 1. 从通用固件节点句柄(child,类型为 fwnode_handle*)转换为设备树节点(np,类型为 device_node*) struct device_node *np = of_node(child); // 2. 访问设备树节点的专属成员:np->name(设备树节点的名称,如 "led0"、"uart1") if (IS_ENABLED(CONFIG_OF) && !led.name && np) led.name = np->name; // 只有 device_node 才有 name 成员,fwnode_handle 没有
- 若直接用
fwnode_handle,无法获取name(通用句柄不包含该字段);- 必须通过
of_node()转换为device_node,才能访问设备树节点的原生名称。4. 使用注意事项
(1)必须配合设备树启用配置
of_node()依赖内核的设备树支持,因此使用前通常需要用IS_ENABLED(CONFIG_OF)做编译期检查,避免在未启用设备树的内核中报错:if (IS_ENABLED(CONFIG_OF) && np) { // 确保设备树功能已启用 // 访问 np 的设备树专属成员 }(2)输入句柄必须是设备树类型
若传入的
fwnode_handle是 ACPI 或其他固件类型的节点(fwnode->type != FWNODE_OF),of_node()会返回NULL,直接使用会导致空指针错误。因此需先判断返回值是否有效:struct device_node *np = of_node(child); if (!np) { dev_err(dev, "fwnode is not a device tree node\n"); return -EINVAL; }(3)与
fwnode_*函数的配合
of_node()与通用的fwnode_*函数(如fwnode_property_read_string)是互补关系,而非替代:
- 优先用
fwnode_*函数:处理属性读取(如读label、default-state)等通用操作,确保驱动兼容设备树、ACPI 等多种固件;- 必要时用
of_node():当需要设备树特有功能(如读节点名np->name、用of_property_match_string等of_*专用 API)时,再转换为device_node。
create_gpio_led
create_gpio_led函数是leds-gpio驱动的核心实现,负责将一个 GPIO 控制的 LED 设备注册到内核 LED 子系统,完成从硬件配置到用户空间控制接口的完整初始化。其核心功能是将 GPIO 引脚与 LED 设备逻辑绑定,并向系统注册可操作的 LED 设备。代码核心逻辑解析:
1. 函数作用
create_gpio_led主要完成三件事:
- 申请并初始化 LED 对应的 GPIO 资源(兼容传统 GPIO 编号和现代
gpio_desc描述符);- 配置 LED 设备的基本属性(名称、默认亮度、触发器、控制函数等);
- 将 LED 设备注册到内核 LED 子系统,生成用户空间控制接口(
/sys/class/leds/<name>/)。2. 逐段解析
(1)初始化 GPIO 描述符(优先使用现代
gpio_desc)led_dat->gpiod = template->gpiod; // 从模板获取 gpio_desc(现代方式) if (!led_dat->gpiod) { // 若没有 gpio_desc,则走传统 GPIO 编号的兼容路径 unsigned long flags = 0; // 检查 GPIO 编号是否有效 if (!gpio_is_valid(template->gpio)) { dev_info(parent, "Skipping unavailable LED gpio %d (%s)\n", template->gpio, template->name); return 0; } // 处理低电平有效(active_low)标志 if (template->active_low) flags |= GPIOF_ACTIVE_LOW; // 申请 GPIO 资源(自动释放) ret = devm_gpio_request_one(parent, template->gpio, flags, template->name); if (ret gpiod = gpio_to_desc(template->gpio); if (IS_ERR(led_dat->gpiod)) return PTR_ERR(led_dat->gpiod); }
- 现代方式:优先使用
template->gpiod(struct gpio_desc*,GPIO 描述符,设备树或现代驱动常用)。- 兼容传统方式:若没有
gpiod,则使用传统 GPIO 编号(template->gpio),通过devm_gpio_request_one申请 GPIO 资源,并转换为gpiod(统一后续操作接口)。- 两种方式最终都确保
led_dat->gpiod有效(指向该 LED 对应的 GPIO 描述符)。(2)配置 LED 核心设备属性
// 配置 LED 设备名称(用户空间可见,如 /sys/class/leds/user-led/) led_dat->cdev.name = template->name; // 配置默认触发器(如 "heartbeat" 心跳模式) led_dat->cdev.default_trigger = template->default_trigger; // 标记 GPIO 是否可能休眠(如使用 I2C GPIO 扩展器时) led_dat->can_sleep = gpiod_cansleep(led_dat->gpiod); led_dat->blinking = 0; // 初始化为非闪烁状态 // 配置闪烁控制函数(若平台提供) if (blink_set) { led_dat->platform_gpio_blink_set = blink_set; // 平台特定闪烁函数 led_dat->cdev.blink_set = gpio_blink_set; // 通用闪烁接口 } // 配置亮度控制函数(核心控制逻辑) led_dat->cdev.brightness_set = gpio_led_set;
led_dat->cdev是struct led_classdev类型,是内核 LED 子系统的标准设备结构,用于向系统注册 LED 设备。- 通过配置
brightness_set和blink_set函数,定义了用户空间控制 LED 亮度和闪烁的底层实现。(3)设置 LED 初始状态
// 确定初始亮度状态 if (template->default_state == LEDS_GPIO_DEFSTATE_KEEP) { // 保持当前 GPIO 状态(读取硬件当前值) state = !!gpiod_get_value_cansleep(led_dat->gpiod); } else { // 根据默认状态(ON/OFF)设置 state = (template->default_state == LEDS_GPIO_DEFSTATE_ON); } // 初始化亮度值(LED_FULL 表示最大亮度,LED_OFF 表示熄灭) led_dat->cdev.brightness = state ? LED_FULL : LED_OFF; // 若休眠时不需要保持状态,则设置 suspend/resume 标志 if (!template->retain_state_suspended) led_dat->cdev.flags |= LED_CORE_SUSPENDRESUME;
- 初始状态由
template->default_state决定(来自设备树default-state属性或platform_data)。gpiod_get_value_cansleep:安全读取 GPIO 当前值(支持可能休眠的 GPIO 设备)。(4)配置 GPIO 方向并注册 LED 设备
// 将 GPIO 配置为输出模式,并设置初始电平(state 为 0 或 1) ret = gpiod_direction_output(led_dat->gpiod, state); if (ret work, gpio_led_work); // 将 LED 设备注册到内核 LED 子系统 return led_classdev_register(parent, &led_dat->cdev);
gpiod_direction_output:将 GPIO 设为输出,并设置初始电平(与state一致)。led_classdev_register:核心注册函数,完成后会在/sys/class/leds/下生成以template->name命名的目录,包含brightness、trigger等控制文件,用户可通过这些文件操作 LED(如echo 1 > brightness点亮)。总结
create_gpio_led是 GPIO LED 设备的 “初始化引擎”,其工作流程可概括为:
- 兼容处理 GPIO 资源(现代
gpio_desc或传统编号);- 配置 LED 设备的核心属性(名称、触发器、控制函数);
- 设置初始状态并将 GPIO 设为输出;
- 注册设备到内核 LED 子系统,开放用户空间接口。
通过这个函数,硬件层面的 GPIO 引脚被抽象为软件层面的 LED 设备,实现了 “硬件操作” 与 “用户控制” 的解耦,是 Linux 驱动中 “硬件抽象” 思想的典型体现。
巩固:
Linux设备驱动里,是先初始化再注册到内核,还是先注册再初始化?
在 Linux 设备驱动中,标准流程是 “先初始化,再注册”—— 即先完成设备 / 驱动的所有初始化工作(如资源申请、参数配置、状态设置等),再调用内核提供的注册接口将其注册到内核子系统中。这样可以确保内核管理的是一个 “就绪状态” 的设备 / 驱动,避免注册后因未初始化完全而导致的异常。
具体原因与示例:
1. 驱动注册的本质
内核的 “注册” 操作本质是将设备 / 驱动的信息录入内核管理框架(如平台驱动框架、字符设备框架、LED 子系统等),并使其具备被内核调度或被用户空间访问的能力。
如果先注册后初始化,内核可能在初始化完成前就尝试访问设备(如调用操作函数),导致未定义行为(如空指针、资源未就绪)。2. 典型驱动的 “初始化→注册” 流程
以你熟悉的
leds-gpio驱动为例,create_gpio_led函数完全遵循这一流程:
- 先初始化:完成了 GPIO 资源申请、设备名称设置、操作函数绑定、硬件初始状态配置等所有必要工作。
- 后注册:调用
led_classdev_register将设备加入内核 LED 子系统,此时内核可以安全地通过注册的操作函数(如brightness_set)控制设备。3. 其他驱动类型的相同逻辑
无论是平台驱动、字符设备还是网络设备,均遵循这一原则:
平台驱动:
static int my_probe(...) { // 初始化:申请内存、解析设备树、配置硬件 priv = devm_kzalloc(...); parse_dt(priv); init_hw(priv); // 注册:将设备注册到相应子系统(如字符设备) cdev_add(&priv->cdev, devt, 1); }字符设备:
static int char_dev_init(void) { // 初始化:设置file_operations、分配设备号 cdev_init(&my_cdev, &fops); alloc_chrdev_region(&devt, 0, 1, "mydev"); // 注册:添加到内核字符设备表 cdev_add(&my_cdev, devt, 1); }4. 反例:先注册后初始化的风险
如果颠倒顺序(先注册后初始化),可能导致:
- 内核在初始化完成前调用设备的操作函数(如用户空间读写设备),访问未初始化的资源(如空指针)。
- 硬件状态未就绪(如 GPIO 未配置方向),导致操作失败或硬件异常。
总结
Linux 设备驱动的标准流程是 **“先初始化,后注册”**:
- 初始化:完成资源申请、参数配置、硬件就绪等所有必要准备工作。
- 注册:将设备 / 驱动信息提交给内核管理框架,使其正式 “上线”。
这一流程确保了内核管理的设备处于可用状态,是驱动可靠性的基础,也是 Linux 驱动开发的通用规范。