1.课题概述
基于SOA海鸥优化算法的PID控制器最优控制参数计算matlab仿真,通过SOA优化PID的kp,ki,kd三组参数,对比普通的PID控制器的控制效果。
2.系统仿真结果

3.核心程序与模型
版本:MATLAB2022a
%使用优化后的参数控制PID控制器
for k=1:10000time(k) = k*ts;%设定比例系数kpkp = kps(end);ki = kis(end);kd = kds(end);% 设定参考输入 rin(k) 的值为 1,可视为阶跃输入Ref(k) = 1;% 计算控制输出 u(k),使用 PID 控制器的计算方式,根据状态变量和相应系数Uctrl(k)= kp*x(1)+kd*x(2)+ki*x(3);% 计算系统的输出 yout(k),根据系统的离散差分方程,利用系统的分母和分子系数以及输入信号的历史值yout(k) =-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;% 计算当前时刻的误差,为参考输入 rin(k) 与系统输出 yout(k) 的差值errs(k) = Ref(k)-yout(k);% 保存输入信号和输出信号的前一个时刻的值,用于下一次迭代u_2 = u_1;u_1 = Uctrl(k);y_2 = y_1;y_1 = yout(k);x(1) = errs(k); x(2) = (errs(k)-err1)/ts; x(3) = x(3)+errs(k)*ts; err1 = errs(k);
endfigure
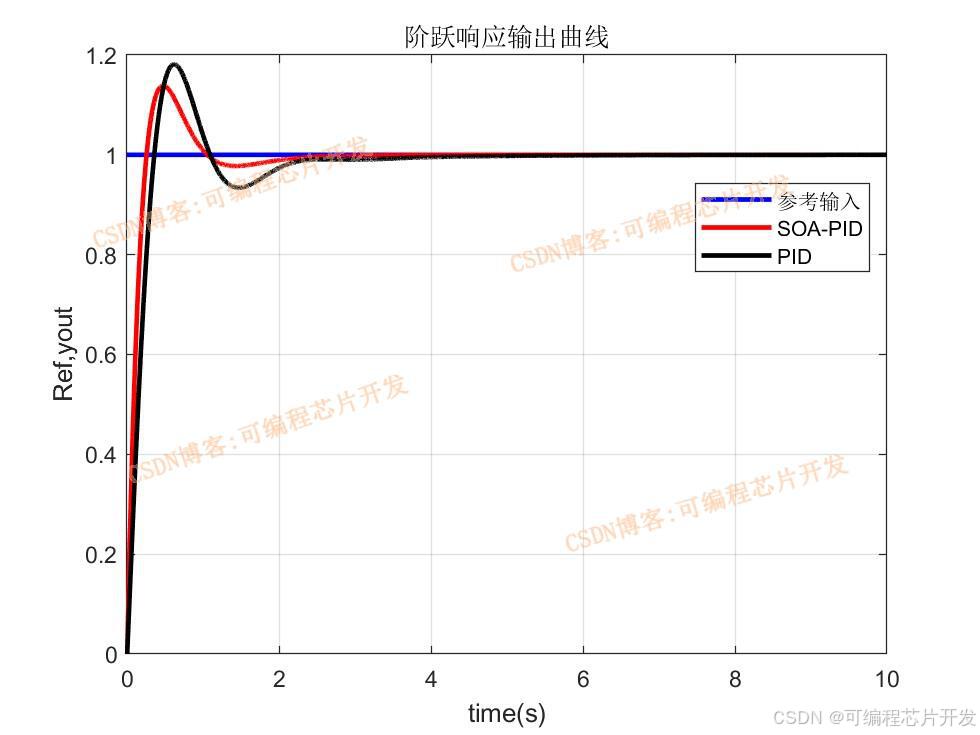
plot(time,Ref,'b',time,yout,'r','LineWidth',2)
xlabel('time(s)');
ylabel('Ref,yout');
grid on
title('阶跃响应输出曲线')figure
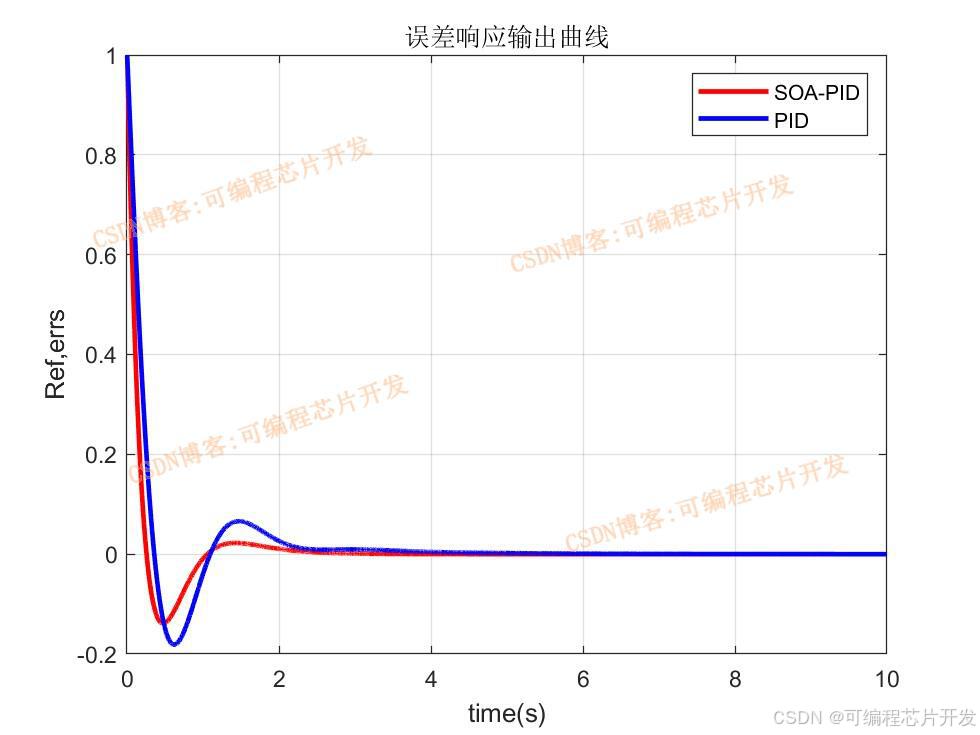
plot(time,errs,'b','LineWidth',2)
xlabel('time(s)');
ylabel('Ref,errs');
grid on
title('误差响应输出曲线')save R1.mat ysoas kps kis kds time errs yout Ref
4.系统原理简介
PID(比例 - 积分 - 微分)控制器由于其结构简单、稳定性好、可靠性高以及易于实现等优点,在工业过程控制、机器人控制、航空航天等众多领域得到了广泛应用。PID 控制器的性能在很大程度上取决于其三个参数(比例系数 、积分系数 、微分系数 )的取值。然而,传统的 PID 参数整定方法,如试凑法、Ziegler-Nichols 法等,往往依赖于经验和大量的试验,对于复杂的控制系统,难以快速准确地找到最优的参数组合,从而影响控制系统的性能。
海鸥优化算法(SOA)是一种基于自然界海鸥群体觅食行为的新型智能优化算法。它通过模拟海鸥在搜索食物过程中的迁徙、攻击和觅食等行为,能够在复杂的搜索空间中有效地寻找最优解。将 SOA 应用于 PID 控制器参数的优化,可以克服传统整定方法的不足,快速准确地确定最优的 PID 参数,提高控制系统的性能和稳定性。
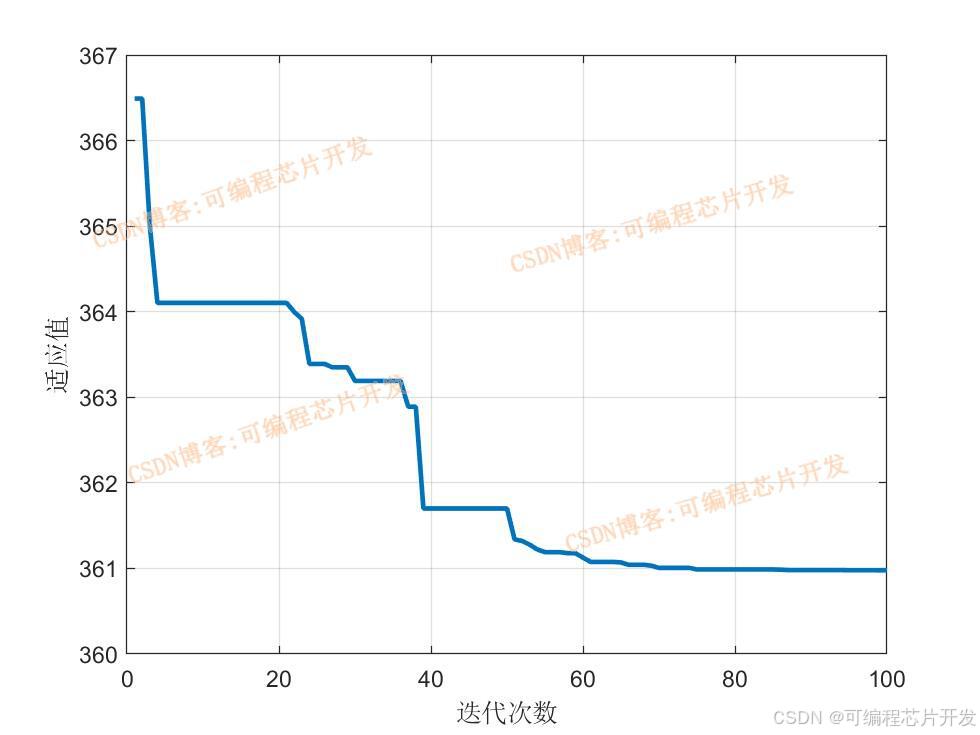
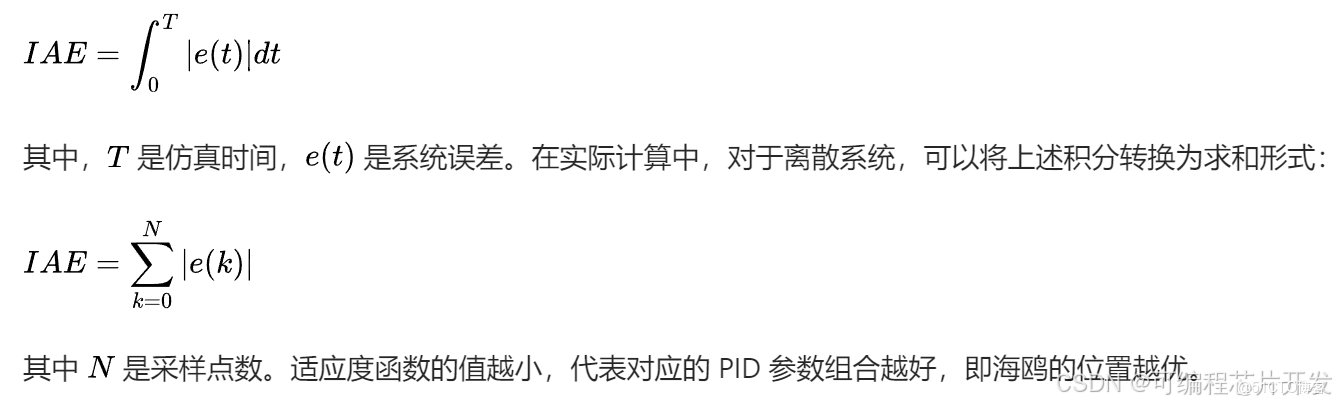
在利用 SOA 优化 PID 控制器参数时,需要定义一个适应度函数来评估每一组 PID 参数(即每只海鸥的位置所代表的参数组合)的优劣。通常以控制系统的性能指标作为适应度函数,例如可以采用积分绝对误差(IAE)、积分平方误差(ISE)或时间乘以绝对误差积分(ITAE)等作为适应度函数。以 IAE 为例,其计算公式为:
与传统的 PID 参数整定方法相比,基于 SOA 的优化方法能够在较短的时间内找到更接近最优解的 PID 参数组合。由于 SOA 算法通过模拟海鸥的智能行为,在全局搜索和局部搜索之间进行了有效的平衡,能够快速地在广阔的参数空间中定位到较优的区域,然后在该区域进行精细的搜索,从而提高了收敛速度和精度。通过大量的实验仿真表明,在相同的控制系统和性能指标要求下,基于 SOA 的 PID 控制器参数优化方法能够在较少的迭代次数内达到比传统方法更低的适应度值,即更好的控制性能。