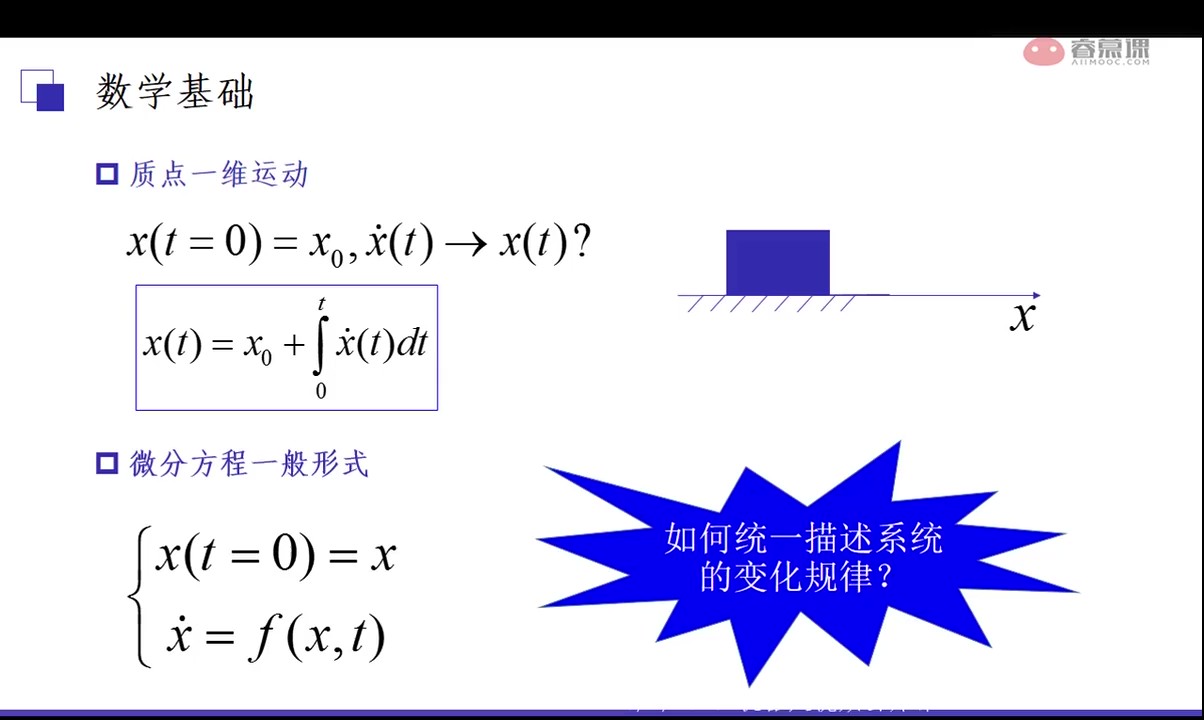
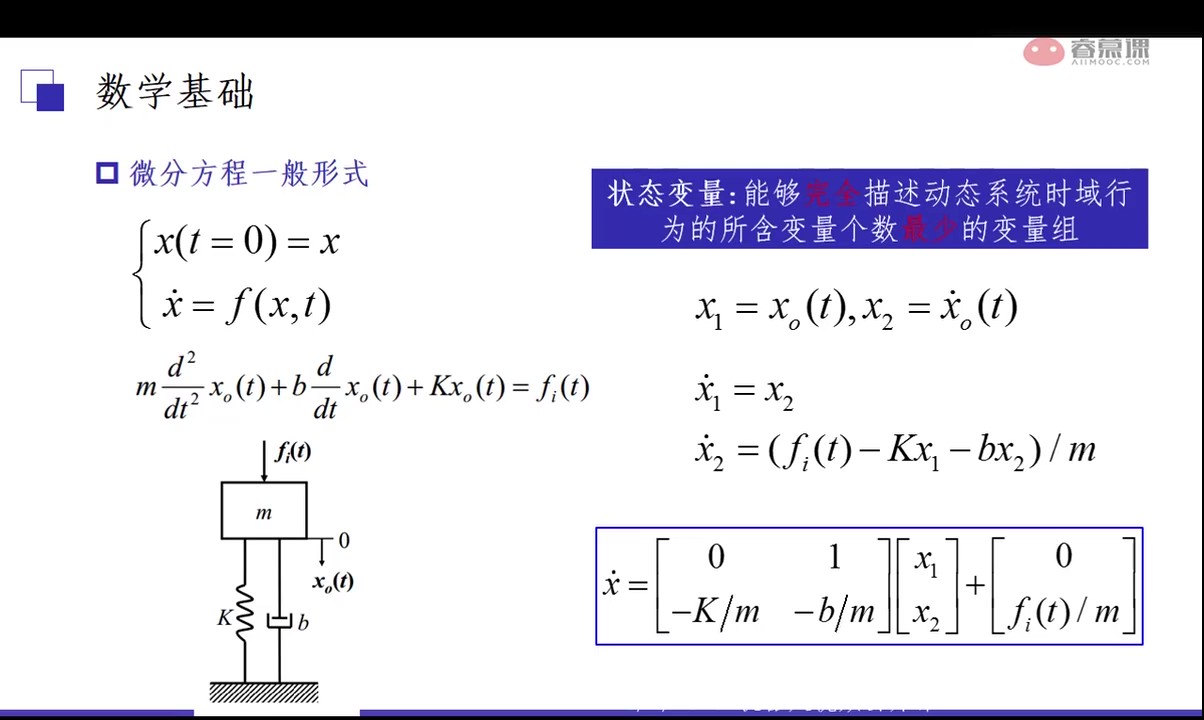
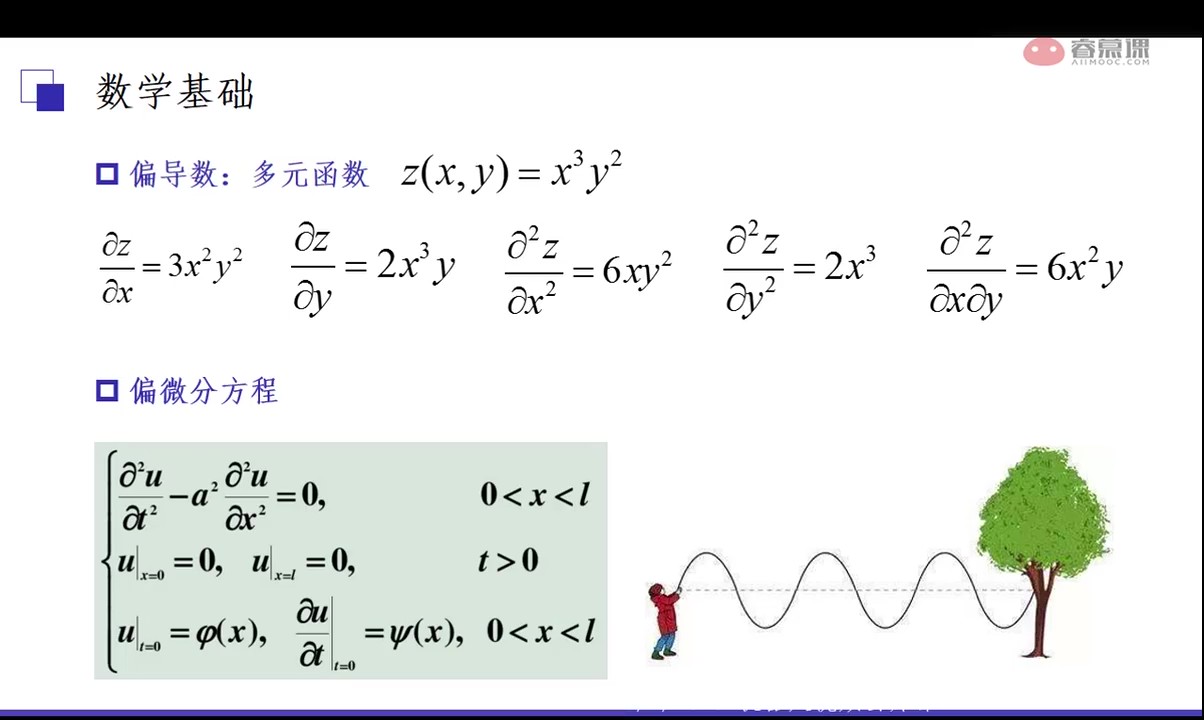
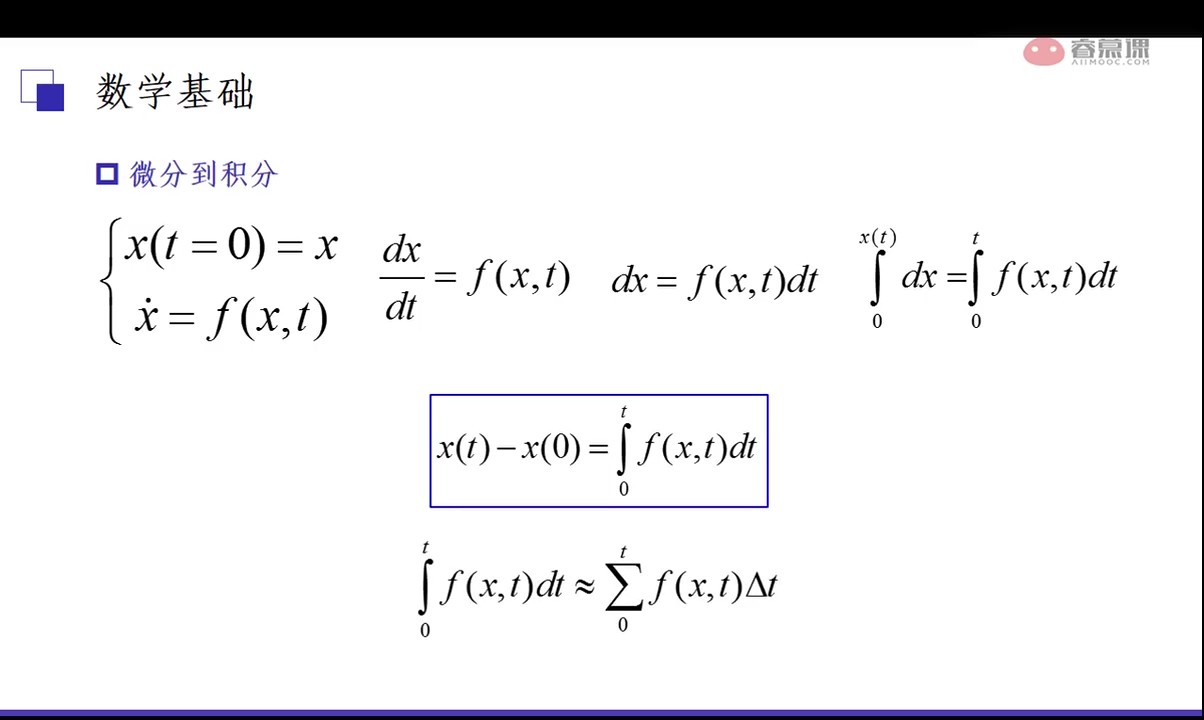
当前位置: 首页 > news >正文 机器人动力学-上交桂凯-睿慕课 news 2025/9/15 21:50:16 1.1 绪论 1.2 数学基础 已知系统的初始状态+速度->未来的变化状态均可知 质量弹簧阻尼二阶系统也可以写成微分方程的形式,状态变量为位置,速度 2 动力学系统建模 2.1 理论力学回顾 查看全文 http://www.wxhsa.cn/company.asp?id=5040 相关文章: 2 linux系统基础命令+文件操作命令 支持国产cpu架构的nacos-2.4.3 nc工具使用 - 谷粒 完整教程:【C++】22. 封装哈希表实现unordered_set和unordered_map Azure App Service连接Azure SQL MI 将目标数据复制到服务器-ServerSetReplicatedTargetData() 不是说 PHP 不行了吗?为什么 Swoole 还在更新? qoj1831 Bruteforce C++数据结构和算法:链表 CAI:开源网络安全AI框架,打造自主安全测试智能体 GAS中,负责封装技能所影响的目标数据(如 Actor、位置、碰撞结果等)-FGameplayAbilityTargetData 详细介绍:Maven入门_简介、安装与配置 实用指南:立体校正原理 train-labels.idx1-ubyte里是什么 滑动窗口最大值-leetcode 创建预测窗口-ScopedPredictionWindow(); 95. 不同的二叉搜索树 II lc1028-从先序遍历还原二叉树 P12558 [UOI 2024] Heroes and Monsters 题解 加把劲——2025 年中总结 Ability-GetCurrentActorInfo()-IsLocallyControlled()和APawn::IsLocallyControlled() 应该遵守的代码规范与读《数学之美》有感 AbilitySystemComponent和AbilityTask AT_arc171_c [ARC171C] Swap on Tree 202509_QQ_冷门的Base家族 SpawnActorDeferred()和SpawnActorOfClass() 【QT】信号和槽 学习日报|线程池专题学习总结 - 详解 如何设计业务架构 - 智慧园区 snmp协议