转自:https://zhuanlan.zhihu.com/p/650469278
Transformer 模型在处理序列数据时,其自注意力机制使得模型能够全局地捕捉不同元素之间的依赖关系,但这样做的代价是丧失了序列中的元素顺序信息。由于自注意力机制并不考虑元素在序列中的位置,所以在输入序列的任何置换下都是不变的,这就意味着模型无法区分序列中元素的相对位置。在许多自然语言处理任务中,词语之间的顺序是至关重要的,所以需要一种方法来让模型捕获这一信息。
这就是位置编码(Positional Encoding)的角色所在。本文主要介绍常见的绝对位置编码(sinusoidal),旋转位置编码(RoPE),以及相对位置编码ALiBi。
sinusoidal位置编码
绝对位置编码是直接将序列中每个位置的信息编码进模型的,从而使模型能够了解每个元素在序列中的具体位置。原始Transformer提出时采用了sinusoidal位置编码,通过正弦和余弦的函数结构使得模型捕获位置之间的复杂关系,且这些编码与序列中每个位置的绝对值有关。
𝑃𝐸(𝑝𝑜𝑠,2𝑖)=𝑠𝑖𝑛(𝑝𝑜𝑠/100002𝑖/𝑑model),𝑃𝐸(𝑝𝑜𝑠,2𝑖+1)=𝑐𝑜𝑠(𝑝𝑜𝑠/100002𝑖/𝑑model)
其中,pos表示位置,𝑑𝑚𝑜𝑑𝑒𝑙代表embedding的维度,2𝑖,2𝑖+1代表的是embedding不同位置的索引。
原始 Transformer 的位置编码虽然是基于绝对位置的,但其数学结构使其能够捕获一些相对位置信息。使用正弦和余弦函数的组合为每个位置创建编码,波长呈几何级数排列,意味着每个位置的编码都是独特的。然而,正弦和余弦函数的周期性特性确保了不同位置之间的编码关系是连续且平滑的。
比如:
- 对于相邻位置,位置编码的差异较小,与两者之间的距离成正比。
- 对于相隔较远的位置,位置编码的差异较大,与两者之间的距离成正比。
这种连续和平滑的关系允许模型学习位置之间的相对关系,而不仅仅是各自的绝对位置。考虑两个位置 𝑖 和 𝑗,由于正弦和余弦函数的性质,位置编码的差值 𝑃𝐸(𝑖)−𝑃𝐸(𝑗) 将与 𝑖 和 𝑗 之间的差值有关。这意味着通过比较不同位置编码之间的差值,模型可以推断出它们之间的相对位置。
代码实现如下:
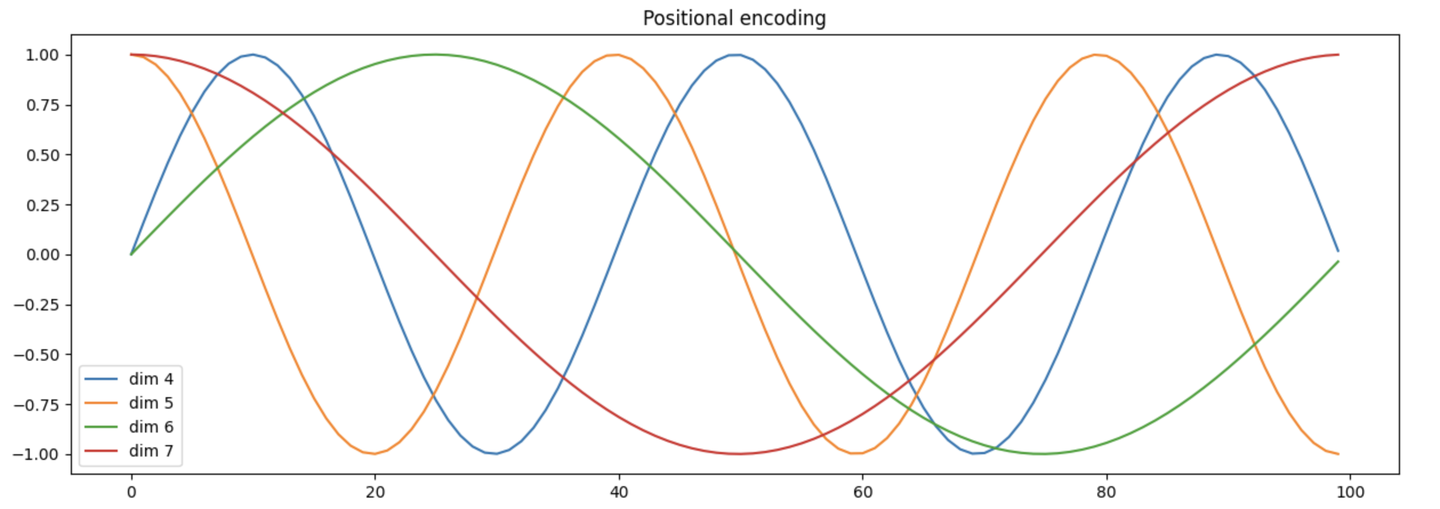
import math import torch import torch.nn as nn import numpy as npclass PositionalEncoding(nn.Module):def __init__(self, d_model: int, dropout_prob: float, max_len: int = 5000):super().__init__()self.dropout = nn.Dropout(dropout_prob)encodings = self.get_positional_encoding(d_model, max_len)self.register_buffer('positional_encodings', encodings, False)@staticmethoddef get_positional_encoding(d_model: int, max_len: int):position = torch.arange(0, max_len, dtype=torch.float32).unsqueeze(1)two_i = torch.arange(0, d_model, 2, dtype=torch.float32)div_term = torch.exp(two_i * -(math.log(10000.0) / d_model))encodings = torch.zeros(max_len, d_model)encodings[:, 0::2] = torch.sin(position * div_term)encodings[:, 1::2] = torch.cos(position * div_term)return encodings.unsqueeze(0).requires_grad_(False)def forward(self, x: torch.Tensor):pe = self.positional_encodings[:x.shape[1]].detach().requires_grad_(False)return self.dropout(x + pe)def _test_positional_encoding():import matplotlib.pyplot as pltplt.figure(figsize=(15, 5))pe = PositionalEncoding.get_positional_encoding(20, 100)print(pe.shape)plt.plot(np.arange(100), pe[:, 0, 4:8].numpy())plt.legend(["dim %d" % p for p in [4, 5, 6, 7]])plt.title("Positional encoding")plt.show()if __name__ == '__main__':_test_positional_encoding()
可以看到不同维度沿着序列方向的位置编码变化如下:
Rotary Position Embedding
sinusoidal位置编码对相对位置关系的表示还是比较间接的,那有没有办法更直接的表示相对位置关系呢?那肯定是有的,而且有许多不同的方法,旋转位置编码(Rotary Position Embedding,RoPE)是一种用绝对位置编码来表征相对位置编码的方法,并被用在了很多大语言模型的设计中。
RoPE的设计思路可以这么来理解:我们通常会通过向量内积来计算注意力系数,如果能够对𝑞, 𝑘向量注入了位置信息,然后用更新的𝑞,𝑘向量做内积就会引入位置信息了。
假设𝑓(𝑞,𝑚)表示给在位置𝑚的向量𝑞添加位置信息的操作,如果叠加了位置信息后的𝑞(位置m)和𝑘(位置n)向量的内积可以表示为它们之间距离的差m-n的一个函数,那不就能够表示它们的相对位置关系了。也就是我们希望找到下面这个等式的一组解:
<𝑓(𝑞,𝑚),𝑓(𝑘,𝑛)>=𝑔(𝑞,𝑘,𝑚−𝑛)
RoPE这一研究就是为上面这个等式找到了一组解答,也就是
𝑓(𝑞,𝑚)=𝑞𝑒𝑖𝑚𝜃
此时就能够使得两个向量的内积包含它们的相对位置关系𝑚−𝑛了(在复数域,转为共轭内积后取实部)
<𝑓(𝑞,𝑚),𝑓(𝑘,𝑛)>=𝑅𝑒[𝑞𝑒𝑖𝑚𝜃⋅𝑘𝑒−𝑖𝑛𝜃]=𝑅𝑒[𝑞⋅𝑘𝑒𝑖(𝑚−𝑛)𝜃]
由于这里𝑓函数的定义其实对应着向量的旋转,所以这种位置编码也就叫做“旋转位置编码”。基于𝑓函数的矩阵形式以及内积的线性叠加性,可以得到下面形式(具体推导感兴趣的可以看苏剑林老师的博客,本文主要介绍思想)
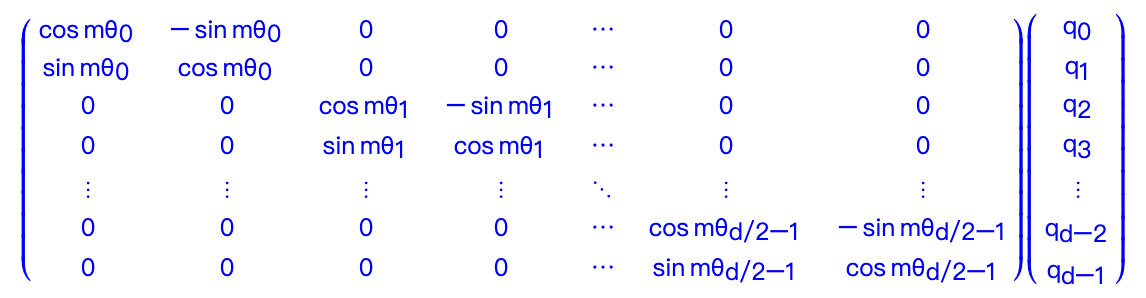
有了这一形式后,具体实现有两种方式:
- 转到复数域,对两个向量进行旋转,再转回实数域
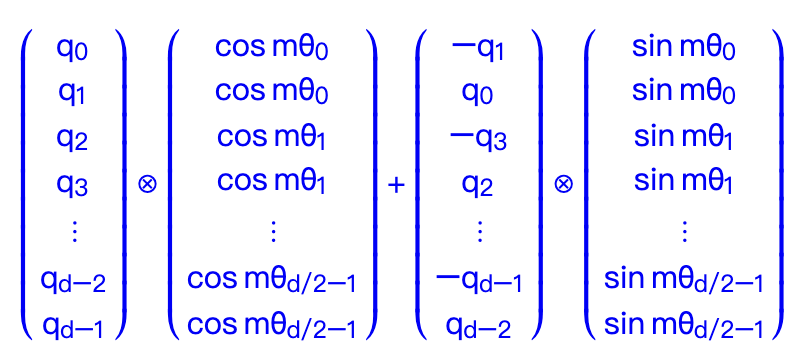
- 直接在实数域通过向量和正余弦函数的乘法进行运算,也就是下面这个公式
llama的代码实现就是采用了第一种形式,如下
def precompute_freqs_cis(dim: int, end: int, theta: float = 10000.0):freqs = 1.0 / (theta ** (torch.arange(0, dim, 2)[: (dim // 2)].float() / dim))t = torch.arange(end, device=freqs.device) # type: ignorefreqs = torch.outer(t, freqs).float() # type: ignorefreqs_cis = torch.polar(torch.ones_like(freqs), freqs) # complex64return freqs_cisdef reshape_for_broadcast(freqs_cis: torch.Tensor, x: torch.Tensor):ndim = x.ndimassert 0 <= 1 < ndimassert freqs_cis.shape == (x.shape[1], x.shape[-1])shape = [d if i == 1 or i == ndim - 1 else 1 for i, d in enumerate(x.shape)]return freqs_cis.view(*shape)def apply_rotary_emb(xq: torch.Tensor,xk: torch.Tensor,freqs_cis: torch.Tensor, ) -> Tuple[torch.Tensor, torch.Tensor]:xq_ = torch.view_as_complex(xq.float().reshape(*xq.shape[:-1], -1, 2))xk_ = torch.view_as_complex(xk.float().reshape(*xk.shape[:-1], -1, 2))freqs_cis = reshape_for_broadcast(freqs_cis, xq_)xq_out = torch.view_as_real(xq_ * freqs_cis).flatten(3)xk_out = torch.view_as_real(xk_ * freqs_cis).flatten(3)return xq_out.type_as(xq), xk_out.type_as(xk)
第二种方式的实现会更加易懂一点,就是把前面那个公式中的四个向量凑出来,然后照着公式算一下就可以了,示例代码如下:
import torch import mathdef rotary_position_embedding(q, k):"""Rotary Position Embedding (RoPE) for queries and keys.Args:q: tensor for queries of shape (batch_size, num_heads, seq_len, dim)k: tensor for keys of shape (batch_size, num_heads, seq_len, dim)Returns:Rotated queries and keys"""batch_size, num_heads, seq_len, dim = q.size()# Begin of sinusoidal_position_embedding contentposition = torch.arange(seq_len, dtype=torch.float).unsqueeze(-1).to(q.device)div_term = torch.exp(torch.arange(0, dim, 2, dtype=torch.float) * -(math.log(10000.0) / dim)).to(q.device)pos_emb = position * div_termpos_emb = torch.stack([torch.sin(pos_emb), torch.cos(pos_emb)], dim=-1).flatten(-2, -1)pos_emb = pos_emb.unsqueeze(0).unsqueeze(1)pos_emb = pos_emb.expand(batch_size, num_heads, -1, -1)# End of sinusoidal_position_embedding content# Extract and duplicate cosine and sine embeddingscos_emb = pos_emb[..., 1::2].repeat_interleave(2, dim=-1)sin_emb = pos_emb[..., ::2].repeat_interleave(2, dim=-1)# Create alternate versions of q and kq_alternate = torch.stack([-q[..., 1::2], q[..., ::2]], dim=-1).reshape(q.size())k_alternate = torch.stack([-k[..., 1::2], k[..., ::2]], dim=-1).reshape(k.size())# Rotate queries and keysq_rotated = q * cos_emb + q_alternate * sin_embk_rotated = k * cos_emb + k_alternate * sin_embreturn q_rotated, k_rotated
ALiBi
使用正弦位置编码的transformer的外推能力非常弱。虽然旋转位置编码比正弦方法有所改进,但仍未达到令人满意的结果。
为了有效地实现外推,作者引入了一种称为"注意力线性偏置 (ALiBi)"的方法。与传统方法不同,ALiBi不向单词embedding中添加位置embedding,而是根据token之间的距离给 attention score 加上一个预设好的偏置矩阵,比如 𝑞 和 𝑘 相对位置差 1 就加上一个 -1 的偏置,两个 token 距离越远这个负数就越大,代表他们的相互贡献越低。由于注意力机制一般会有多个head,这里针对每一个head会乘上一个预设好的斜率项(Slope)。举个例子,原来的注意力矩阵为𝐴,叠加了ALiBi后为𝐴+𝐵×𝑚如下所示:
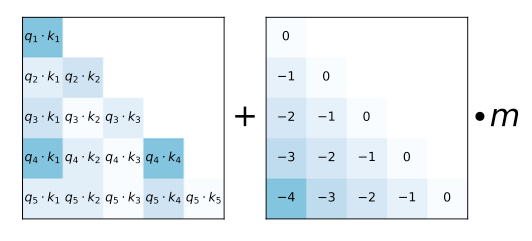
左侧的矩阵展示了每一对query-key的注意力得分。右侧的矩阵展示了每一对query-key之间的距离。m是固定的参数,每个注意头对应一个标量。
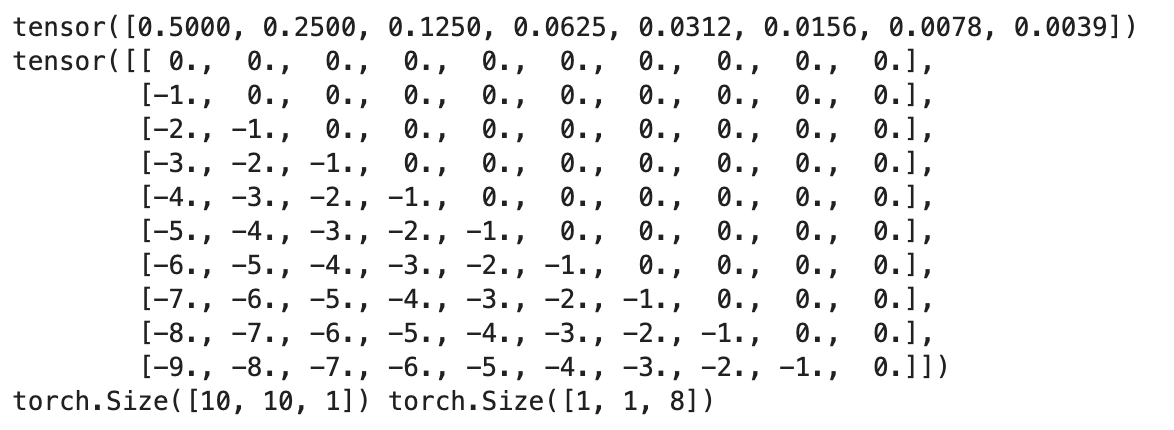
import math import torch from torch import nndef get_slopes(n_heads: int):n = 2 ** math.floor(math.log2(n_heads))m_0 = 2.0 ** (-8.0 / n)m = torch.pow(m_0, torch.arange(1, 1 + n))if n < n_heads:m_hat_0 = 2.0 ** (-4.0 / n)m_hat = torch.pow(m_hat_0, torch.arange(1, 1 + 2 * (n_heads - n), 2))m = torch.cat([m, m_hat])return m@torch.no_grad() def get_alibi_biases(n_heads: int, mask: torch.Tensor):m = get_slopes(n_heads).to(mask.device)seq_len = mask.size(0)distance = torch.tril(torch.arange(0, -seq_len, -1).view(-1, 1).expand(seq_len, seq_len))print(distance)return distance[:, :, None] * m[None, None, :]seq_len = 10 n_heads = 8m = get_slopes(n_heads) print(m)alibi_biases = torch.zeros(seq_len,seq_len) for j in range(1,seq_len):for i in range(j, seq_len):alibi_biases[i, i - j] = -j print(alibi_biases)print(alibi_biases[:, :, None].shape, m[None, None, :].shape)alibi_biases[:, :, None] * m[None, None, :]
可以看到下面打印出来的第一行就是给不同head的系数𝑚,下面的矩阵就是一个基于两个token 之间距离计算的偏置矩阵。
ALiBi方法不需要对原始网络进行改动,允许在较短的输入序列上训练模型,同时在推理时能够有效地外推到较长的序列,从而实现了更高的效率和性能。