Gradient Descent 梯度下降
一、核心思想:一个最经典的比喻
想象一下,你是一个蒙着眼睛的登山者,被困在一片漆黑的山林中。你的目标是走到山谷的最低点(寻找最低点)。
你会怎么做?
-
你会用脚感受一下周围的地面,找出哪个方向是“下坡”最陡的。
-
然后朝着那个最陡的下坡方向迈出一步。
-
到达新位置后,再次用脚感受,寻找新的最陡下坡方向,再迈出一步。
-
...如此反复...
直到你感觉到四周都是上坡,无论往哪个方向走,地面都会变高,说明你已经到达了谷底!
这个“感受坡度”和“向下走”的过程,就是梯度下降算法的精髓。
二、把比喻变成数学概念
现在,我们把上面的比喻翻译成机器学习的语言:
| 比喻 | 机器学习中的术语 |
|---|---|
| 登山者所在的位置 | 模型当前的参数值 (例如,线性回归中的权重 w 和偏差 b) |
| 山谷的地形 | 损失函数 (Loss Function) J(w, b) |
| 地面的坡度 | 梯度 (Gradient) ∇J(w, b) |
| 最陡的下坡方向 | 负梯度的方向 -∇J(w, b) |
| 迈出一步的步长 | 学习率 (Learning Rate) α |
| 走到谷底 | 找到使损失函数最小的最优参数 w*, b* |
损失函数:一个衡量模型预测值 ŷ 与真实值 y 之间差距的函数。我们的目标就是找到一组参数,让这个损失函数的值最小。 常见的损失函数有均方误差(MSE)、交叉熵(Cross-Entropy)等。
梯度:一个向量(矢量),表示函数在某一点处各个方向上的斜率(即变化率最快的方向)。梯度指向函数值增长最快的方向。
三、梯度下降的算法步骤
算法流程可以概括为以下几步,这个过程会循环往复,直到满足停止条件(比如达到最大迭代次数或梯度变得非常小):

-
初始化:随机初始化参数
w和b。(相当于把登山者随机放在山上的某个点)。 -
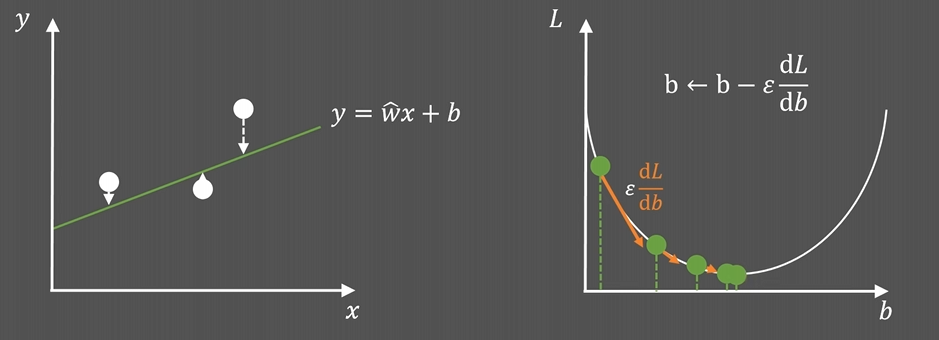
计算梯度:计算当前参数点处的损失函数梯度。
$\text{梯度} = \nabla J(w, b) = \left[ \frac{\partial J}{\partial w}, \frac{\partial J}{\partial b} \right]$
(这相当于用脚感受周围哪个方向最陡)。 -
更新参数:沿着负梯度(即下坡方向)更新参数。
$w = w - \alpha \cdot \frac{\partial J}{\partial w}$
$b = b - \alpha \cdot \frac{\partial J}{\partial b}$
(这相当于朝着最陡的下坡方向迈出一步)。 -
重复:重复步骤2和3,直到梯度接近零(无法再下降)或达到预设的迭代次数。
(不断感受、迈步,直到走到谷底)。
四、关键超参数:学习率
学习率是梯度下降中最重要的超参数。
-
学习率太小:每次迈出的步长非常小。收敛速度慢,需要很多很多步才能到达谷底。
-
学习率太大:步长太大,一步迈得太远,可能会直接跨过最低点,甚至导致损失函数震荡甚至发散,永远找不到最低点。
-
学习率设置得当:能以较快的速度稳定地收敛到最小值。
选择合适的学习率需要经验和技巧,有时也会使用自适应学习率的优化算法(如Adam),它们能自动调整学习率的大小。
五、三种常见的梯度下降
根据每次更新参数时使用的数据量不同,分为三种:
-
批量梯度下降:
-
做法:每次计算梯度和更新参数时,都使用全部的训练数据。
-
优点:梯度方向准确,容易收敛到全局最优。
-
缺点:非常慢,尤其是数据集很大时。
-
-
随机梯度下降:
-
做法:每次只随机使用一个训练样本(抽取部分数据)来计算梯度并更新参数。
-
优点:速度快,可以在线学习。
-
缺点:梯度方向波动很大,损失函数会剧烈震荡,不容易收敛到最优点。
-
-
小批量梯度下降:
-
做法:每次使用一小批数据(比如32, 64, 128个样本)来计算梯度和更新参数。
-
优点:这是最常用的方法!它平衡了批量梯度下降的稳定性和随机梯度下降的速度,更加高效和稳定。
-
缺点:需要手动设置批量大小(batch size)这个超参数。
-
总结
-
梯度下降是一种通过迭代来寻找函数最小值的优化算法。
-
它的核心是沿着负梯度(最陡下降方向) 更新参数。
-
学习率控制着每一步的步长,至关重要。
-
小批量梯度下降是实践中最常用的版本。
它就是机器学习和深度学习模型能够“学习”和“自我优化”的根本动力来源。几乎所有神经网络的训练都离不开它(或其变种,如Adam)的驱动。
一、 Adam 是什么?为什么需要它?
Adam 的全称是 Adaptive Moment Estimation(自适应矩估计)。这个名字完美概括了它的核心思想。
在它之前,我们已经有了很多优化器,但它们各有缺点:
-
SGD(随机梯度下降):简单但震荡严重,收敛慢。
-
SGD with Momentum:加入了“动量”,加速收敛,减轻震荡,但对所有参数使用相同的学习率。
-
Adagrad, RMSprop:自适应地为每个参数调整学习率(对于频繁更新的参数,给予较小的学习率;对于不频繁更新的参数,给予较大的学习率),但它们缺少“动量”概念。
Adam 的诞生就是为了集百家之长:
Adam = Momentum (动量) + RMSprop (自适应学习率) + 偏差校正
它同时考虑了一阶动量(梯度均值,控制方向)和二阶动量(梯度平方的均值,控制步长),并为每个参数自适应地调整学习率。
二、 Adam 的核心思想:两大动量
Adam维护两个状态变量来为每个参数进行自适应调整:
1. 一阶动量(First Moment) - m_t
-
它是什么:梯度的指数移动平均值。它估计了梯度方向的均值。
-
作用:类似于动量。它积累了过去的梯度方向,使得参数更新方向更加稳定,减少震荡,从而加速在稳定方向的收敛。
-
物理意义:就像是“速度”。它让优化过程具有“惯性”,不容易被临时的、嘈杂的梯度所带偏。
2. 二阶动量(Second Moment) - v_t
-
它是什么:梯度平方的指数移动平均值。它估计了梯度大小的均值。
-
作用:类似于 RMSprop。它衡量了历史梯度的大小。对于梯度通常很大的参数,
v_t会很大,从而减小其有效学习率;对于梯度通常很小的参数,v_t会很小,从而增大其有效学习率。 -
物理意义:就像是“加速度”。它感知地形变化,在陡峭(梯度大)的地方刹车(小步走),在平坦(梯度小)的地方加速(大步走)。
Adam的巧妙之处在于,它为每个参数都独立地计算和维护这两个动量!
三、 Adam 的算法流程(一步一步详解)
以下是Adam更新参数 θ_t 的完整步骤:
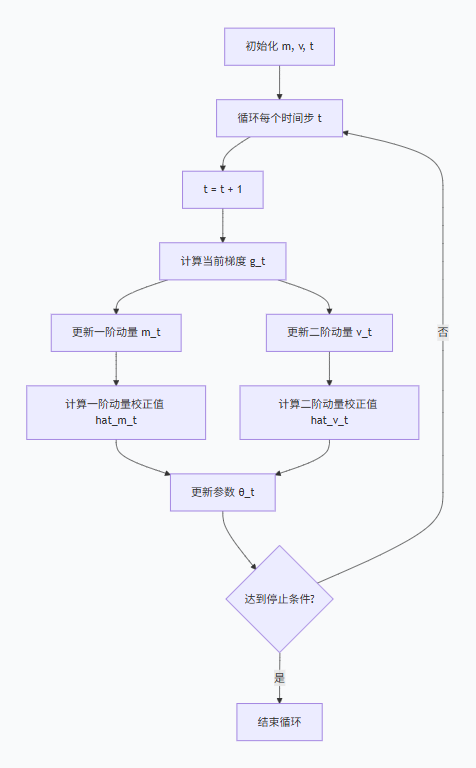
初始化:
-
m_0 = 0(一阶动量初始化为0) -
v_0 = 0(二阶动量初始化为0) -
t = 0(时间步初始化为0)
循环(对于每一个时间步 t):
-
计算当前梯度:
$g_t = \nabla_\theta J_t(\theta_{t-1})$-
在时间步
t,计算损失函数关于参数θ的梯度g_t。
-
-
更新一阶动量(有偏估计):
$m_t = \beta_1 \cdot m_{t-1} + (1 - \beta_1) \cdot g_t$-
用超参数
β1(通常设为0.9)来控制历史动量和当前梯度的权重。这相当于一个指数衰减的平均值。
-
-
更新二阶动量(有偏估计):
$v_t = \beta_2 \cdot v_{t-1} + (1 - \beta_2) \cdot g_t^2$-
用超参数
β2(通常设为0.999)来控制历史动量和当前梯度平方的权重。
-
-
计算一阶动量的偏差校正:
$\hat{m}_t = \frac{m_t}{1 - \beta_1^t}$-
由于
m0和v0初始化为0,在训练初期(t很小的时候),它们会被“偏向”于0。偏差校正可以消除这种初始化带来的偏差,让估计在训练初期更加准确。
-
-
计算二阶动量的偏差校正:
$\hat{v}_t = \frac{v_t}{1 - \beta_2^t}$ -
更新参数:
$\theta_t = \theta_{t-1} - \alpha \cdot \frac{\hat{m}_t}{\sqrt{\hat{v}_t} + \epsilon}$-
α:全局学习率,需要手动设置。 -
ε:一个极小值(通常1e-8),防止分母为零。 -
这一步是Adam的灵魂:
-
\hat{m}_t提供了稳定的更新方向(动量)。 -
\sqrt{\hat{v}_t}提供了自适应的学习率。对于梯度大的参数,v_t大,分母大,有效步长α / √v_t就小;反之亦然。
-
-
为了更直观地展示这个流程,你可以参考以下流程图:
四、 Adam 的超参数
Adam的超参数通常不需要大量调优,因为它们有很强的鲁棒性。
-
α (学习率):最重要的超参数。有时需要根据任务进行调整。默认值可以是
0.001或3e-4。 -
β₁:一阶动量的衰减率。控制历史梯度的权重。默认值 0.9。
-
β₂:二阶动量的衰减率。控制历史梯度平方的权重。默认值 0.999。
-
ε:数值稳定项。几乎不需要改变,默认 1e-8。
五、 为什么 Adam 如此强大和流行?
-
结合了双重优点:同时拥有了动量的加速收敛能力和自适应学习率的稳定性。
-
对每个参数的自适应:为每个参数计算不同的学习率,这使得它非常适合处理稀疏梯度的问题(如自然语言处理中的嵌入层)。
-
实现简单,收敛快:通常默认参数就能取得很好的效果,使得它成为许多研究者和工程师的“首选”优化器。
-
偏差校正:确保了训练初期的稳定性。
总结
| 特性 | 解释 |
|---|---|
| 名字 | Adaptive Moment Estimation |
| 核心 | 同时维护一阶动量(方向)和二阶动量(步长) |
| 更新规则 | $\theta_t = \theta_{t-1} - \alpha \cdot \frac{\hat{m}_t}{\sqrt{\hat{v}_t} + \epsilon}$ |
| 优点 | 收敛快、效果好、对稀疏数据友好、超参数鲁棒 |
| 超参数 | α (学习率), β₁ (0.9), β₂ (0.999), ε (1e-8) |
简单来说,Adam就像一个既聪明又稳健的登山者:他不仅记得自己之前走过的方向(动量,防震荡),还能根据脚下的陡峭程度自动调整步幅(自适应学习率,防失控),因此能非常高效可靠地找到山谷的最低点。