1 基本概念
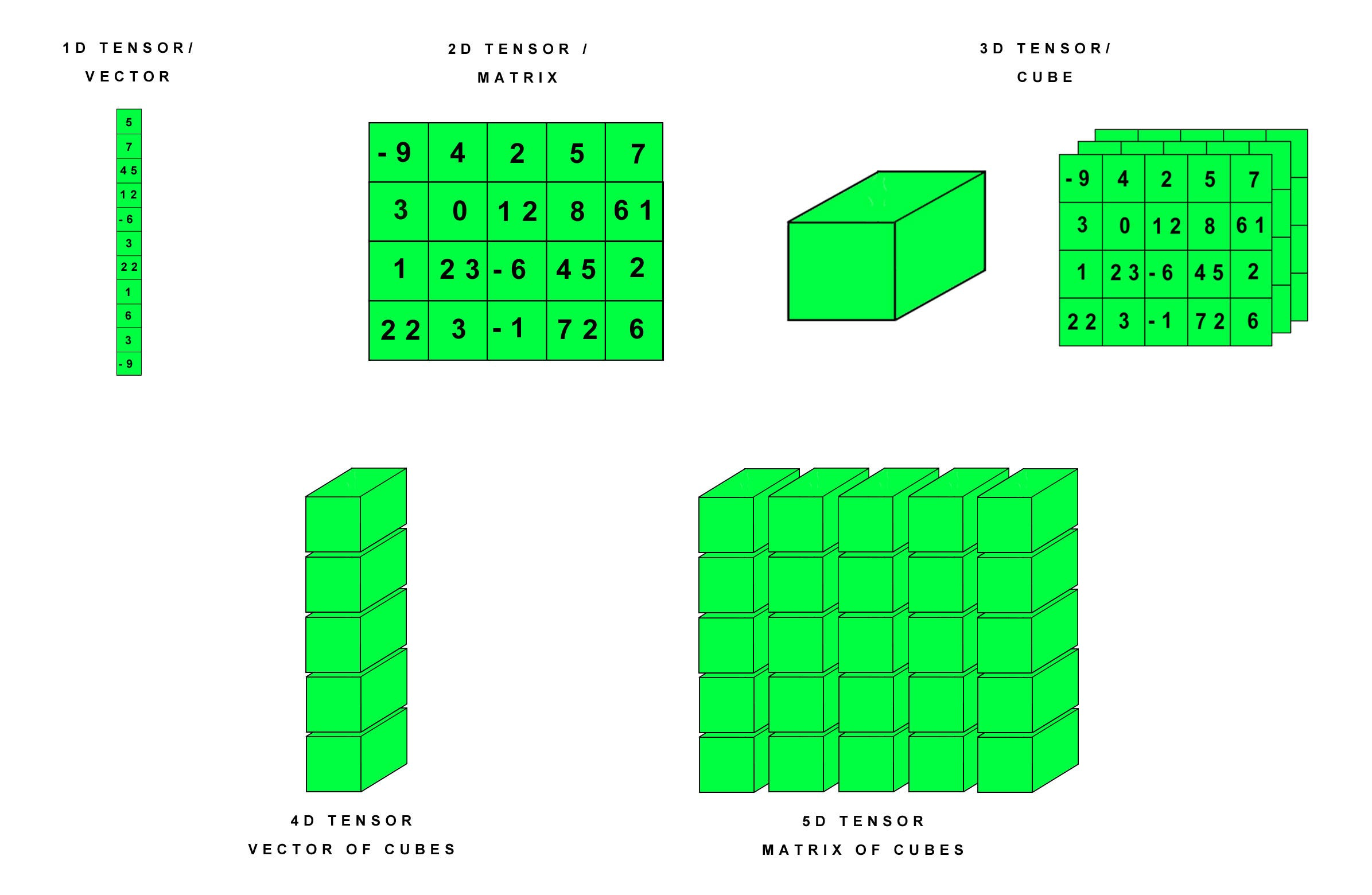
tensor是一个多维数组,类似于NumPy中的ndarray,但tensor可以在GPU上进行高效计算,这是它与ndarray的重要区别之一。它可以表示标量(0维张量)、向量(1维张量)、矩阵(2维张量)以及更高维度的张量,广泛应用于表示模型的输入、输出、参数等。下图比较形象的给出了各种张良:
1.1 创建方式
1. 直接创建
通过torch.tensor()函数,可以直接从python列表或NumPy数组创建张量:
import torch import numpy as np# 从Python列表创建张量 data = [1, 2, 3] x = torch.tensor(data)# 从NumPy数组创建张量 arr = np.array([4, 5, 6]) y = torch.tensor(arr)
2. 使用特定函数创建
torch.zeros():创建全 0 张量。例如,torch.zeros((3, 4))会创建一个形状为(3, 4)(3 行 4 列)的全0矩阵。
torch.ones():创建全 1 张量。例如,torch.ones((2, 2))会生成一个2x2的全1矩阵。
torch.rand():创建一个由在区间[0, 1)上均匀分布的随机数填充的张量。比如torch.rand((2, 3))会得到一个2行3列的随机数张量。
torch.arange():类似于 Python 的range()函数,创建一个等差序列的张量。例如torch.arange(0, 10, 2)会生成tensor([0, 2, 4, 6, 8])。
import torchzero_tensor = torch.zeros((3, 4)) print("zero_tensor:\n", zero_tensor)ones_tensor = torch.ones((2, 2)) print("ones_tensor:\n", ones_tensor)rand_tensor = torch.rand((2, 3)) print("rand_tensor:\n", rand_tensor)arange_tensor = torch.arange(0, 10, 2) print("arange_tensor:\n", arange_tensor)
1.2 张量属性
形状(shape):通过.shape属性获取张量的形状,例如对于x = torch.tensor([[1, 2], [3, 4]]),x.shape返回torch.Size([2, 2]) ,表示这是一个 2 行 2 列的张量。
数据类型(dtype):通过.dtype属性获取张量的数据类型,常见的数据类型包括torch.float32、torch.int64、torch.bool等。创建张量时也可以指定数据类型,如torch.tensor([1, 2, 3], dtype=torch.float32)。
设备(device):通过.device属性获取张量所在的设备,是在CPU还是在GPU上。可以通过.to()方法将张量移动到不同设备,如x = x.to('cuda')(前提是系统支持CUDA且安装了相关驱动)将张量x移动到GPU上进行计算。
requires_grad:该属性是张量的核心属性,用于控制是否追踪该张量的计算历史并计算梯度,是实现自动微分(Automatic Differentiation)的关键开关,如果requires_grad为True,则会为张量分配grad属性,用于存储其梯度。
is_cuda:是一个布尔属性,用来判断一个张量是否在 GPU(CUDA 设备) 上。
1.3 张量操作
索引和切片:与 Python 列表和 NumPy 数组类似,张量可以进行索引和切片操作。例如对于x = torch.tensor([[1, 2, 3], [4, 5, 6]]),x[0, 1]返回第一行第二列的元素2;x[:, 1]返回第二列的所有元素。
数学运算:支持各种数学运算,如加法、减法、乘法、除法等。既可以是张量与标量的运算,也可以是张量与张量之间的运算。例如x + 2表示张量x的每个元素都加 2;x + y(x和y是形状相同的张量)表示对应元素相加。
维度操作:torch.unsqueeze(input, dim)增加维度,例如x形状为Size([3]),则torch.unsqueeze(x, 0)会在索引为0的位置上增加一个维度,形状变为Size([1, 3]),而torch.unsqueeze(x, 1)会在索引为1的位置上增加一个维度,形状变为Size([3, 1]),这里dim参数的取值范围为[-n, n-1](n是原始张量的维度数),非负数索引时,dim=0对应最外层维度,dim=1对应次外层维度,负数索引时,dim=-1对应最内层维度,dim=-2对应次内层维度,以此类推;torch.squeeze(input, dim=None),当不指定dim时,删除张量中所有大小为1的维度,当指定dim时,仅删除第dim个维度(前提是该维度的大小为1,否则不做任何改变);torch.transpose(input, dim0, dim1),转置张量,即交换张量中指定的两个维度,而保持其他维度的顺序不变;torch.reshape(input, shape),改变张量的形状,如对于形状为Size([3, 2])(3行2列)的x,torch.reshape(x, (2, 3))将张量x重塑为2行3列的形状。分析可知,以上操作都是在不改变张量元素数据及总数的前提下,重新组织张量的维度结构。
1.4 张量方法
其实对于相应的张量操作,张量自身都有对应的方法。
1. 索引与切片
index_select(dim, index)
按索引在指定维度上选择元素,示例代码如下:
import torchx = torch.tensor([[1,2],[3,4],[5,6]]) idx = torch.tensor([0,2]) print(x.index_select(0, idx)) # 选择第0和第2行,输出tensor([[1, 2], [5, 6]])
masked_select(mask)
根据布尔掩码选择元素(返回1D张量),示例代码如下:
import torchx = torch.tensor([[1,5],[3,4]]) mask = x > 2 x.masked_select(mask) # 输出tensor([5, 3, 4])
gather(dim, index)
沿指定维度收集元素(更灵活的索引方式),该函数的核心逻辑:沿指定维度(dim),根据索引张量(index)收集输入张量(x)中的元素,输出张量的形状与索引张量(index)的形状完全一致,所以这里idx必须满足维度和x相同,但是每个维度上元素个数不大于x相应维度上元素个数。
import torchx = torch.tensor([[[1,5], [2, 6]], [[3,7], [4,8]]]) idx=torch.tensor([[[1]],[[0]]]) print(x.gather(2, idx)) print(x.gather(1, idx)) print(x.gather(0, idx))
代码中,x形状为 (2, 2, 2),即:dim=0(第 1 维),dim=1(第 2 维),dim=2(第 3 维)大小都为 2。
idx形状为(2, 1, 1),即dim=0为2,dim=1和dim=2都为1,其内容为:
idx[0,0,0] = 1 # 第0行、第0列、第0深的索引值 idx[1,0,0] = 0 # 第1行、第0列、第0深的索引值
gather的核心逻辑是,对于输出张量的每个位置 (i,j,k),其值由以下规则确定:
output[i,j,k] = x[i,j,k] 中,将参数dim维度的索引替换为 idx[i,j,k],即:
若 dim=0:output[i,j,k] = x[ idx[i,j,k], j, k ]
若 dim=1:output[i,j,k] = x[ i, idx[i,j,k], k ]
若 dim=2:output[i,j,k] = x[ i, j, idx[i,j,k] ]
以x.gather(2, idx)(沿dim=2收集)为例,dim=2是 “深维度”(最内层维度),规则:output[i,j,k] = x[i,j, idx[i,j,k]],输出形状与idx一致(2,1,1),具体计算:
i=0, j=0, k=0:idx[0,0,0]=1 → output[0, 0, 0] = x[0,0,1] = 5(第 0 行、第 0 列、第 1 深的值)
i=1, j=0, k=0:idx[1,0,0]=0 → output[1, 0, 0] = x[1,0,0] = 3(第 1 行、第 0 列、第 0 深的值)
结果:tensor([[[5]], [[3]]])。
同理,对于x.gather(1, idx)(沿dim=1收集),dim=1是“列维度”(中间维度),规则:output[i,j,k] = x[i, idx[i,j,k], k]。输出形状为(2,1,1),具体计算:
i=0, j=0, k=0:idx[0,0,0]=1 → output[0, 0, 0] = x[0,1,0] = 2(第 0 批次、第 1 行、第 0 列的值)
i=1, j=0, k=0:idx[1,0,0]=0 → output[1, 0, 0] = x[1,0,0] = 3(第 1 批次、第 0 行、第 0 列的值)
结果:tensor([[[2]], [[3]]])。
最后,x.gather(0, idx)(沿dim=0收集),dim=0是 “行维度”(最外层维度),规则:output[i,j,k] = x[ idx[i,j,k], j, k ]。输出形状为(2,1,1),具体计算:
i=0, j=0, k=0:idx[0,0,0]=1 → output[0, 0, 0] = x[1,0,0] = 3(第 1 行、第 0 列、第 0 深的值)
i=1, j=0, k=0:idx[1,0,0]=0 → output[1, 0, 0] = x[0,0,0] = 1(第 0 行、第 0 列、第 0 深的值)
结果:tensor([[[3]], [[1]]])。
一下代码可以直观的给出张量x立体示意图:


import torch import numpy as np import matplotlib.pyplot as plt from mpl_toolkits.mplot3d import Axes3D# 设置中文字体 plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"] # 解决负号显示问题(可选) plt.rcParams['axes.unicode_minus'] = False # 正确显示负号# 创建张量 x = torch.tensor([[[1,5], [2, 6]], [[3,7], [4,8]]])# 转换为numpy数组以便绘图 x_np = x.numpy()# 创建3D图形 fig = plt.figure(figsize=(10, 8)) ax = fig.add_subplot(111, projection='3d')# 获取张量的维度 depth, rows, cols = x_np.shape# 创建坐标网格 x_coords, y_coords, z_coords = np.meshgrid(np.arange(rows), np.arange(cols), np.arange(depth), indexing='ij')# 展平坐标和值 x_flat = x_coords.flatten() y_flat = y_coords.flatten() z_flat = z_coords.flatten() values = x_np.flatten()# 绘制点 scatter = ax.scatter(x_flat, y_flat, z_flat, c=values, s=500, cmap='viridis', alpha=0.8)# 添加标签 for i, (x, y, z, val) in enumerate(zip(x_flat, y_flat, z_flat, values)):ax.text(x, y, z, f'{val}', fontsize=12, ha='center', va='center', color='white')# 设置坐标轴标签 ax.set_xlabel('行 (Row)') ax.set_ylabel('列 (Column)') ax.set_zlabel('深度 (Depth)')# 设置坐标轴刻度 ax.set_xticks(np.arange(rows)) ax.set_yticks(np.arange(cols)) ax.set_zticks(np.arange(depth))# 添加标题 ax.set_title('3D张量可视化\n形状: {}'.format(x_np.shape))# 添加颜色条 cbar = fig.colorbar(scatter, ax=ax, shrink=0.5, aspect=20) cbar.set_label('元素值')# 设置视角以便更好地观察 ax.view_init(elev=20, azim=45)plt.tight_layout() plt.show()
代码运行后如下所示:

2. 数学运算
x.add(y):对应元素相加
x.sub(y):对应元素相减
x.mul(y):对应元素相乘
x.div(y):对应元素相除
x.remainder(y):对应元素取余
x.pow(y):对x每个元素求y次幂
x.sqrt():对x每个元素求平方根
x.exp():对x每个元素求自然指数(e^x)
x.mean():求平均值,要求x数据类型为float或者complex
x.sum():求和
x.max()/x.min():求最大/最小值
x.std()/var():求标准差/方差,要求x数据类型为float或者complex
3. 维度相关
该部分方法对应维度操作部分,不再详细介绍。
4. 内存与类型
contiguous()
将张量转为内存连续的形式(用于view等方法前),以张量x = torch.tensor([[1, 2, 3], [4, 5, 6]])为例,它是contiguous意味着沿第0维(行)移动1步,需跳过3个元素;沿第1维(列)移动1步,需跳过1个元素。当张量经过某些维度操作(如 transpose、permute、unsqueeze/squeeze 等)后,可能会变成非连续张量(内存中元素的存储顺序与逻辑顺序不一致)。此时,若调用某些要求张量连续的操作(如 view、resize_ 等),会抛出错误,这种情况下就需要调用contiguous()进行转换。
to(dtype)
转换张量数据类型(如float32→float64)。
cpu()/cuda()
将张量转移到 CPU 或 GPU(需 CUDA 支持)。
5. 原地操作
多数方法有后缀_的原地版本(直接修改自身,不返回新张量),如x.add_(3)等价于 x = x + 3。
6. 其他方法
clone():创建张量的副本(深拷贝,不共享内存)。
detach():返回与原张量共享数据,但不关联计算图的张量(用于冻结参数)。
numpy():将张量转为 NumPy 数组(CPU 张量适用,共享内存)。
flatten(start_dim=0, end_dim=-1):展平指定范围的维度。
2 张量自动求导(Autograd)
autograd是实现自动微分(Automatic Differentiation) 的核心系统,它能自动计算张量的梯度,是训练神经网络的基础。
2.1 核心概念
1. 计算图(Computational Graph)
PyTorch在执行张量运算时,会动态构建一张有向无环图 (DAG):
-
节点 (Node):张量(数据)
-
边 (Edge):操作 (Operation, Function)
例如:
import torch x = torch.tensor(2.0, requires_grad=True) y = x**2 + 3*x + 1 # 向前传播,会创建计算图
其计算过程可以分解为:
1)a = x**2 (平方运算)
2)b = 3*x (乘法运算)
3)c = a + b (加法运算)
4)y = c + 1 (加法运算)
则其对应的计算图DAG可表示如下:
x (requires_grad=True)│├─── PowBackward (2) ─── a = x²│└─── MulBackward (3) ─── b = 3*x││a b\ /AddBackward ─── c = a + b││ 1│ /AddBackward ─── y = c + 1
叶子节点
x:初始张量,requeires_grad = True,梯度计算起点。
中间节点
PowBackward:x**2 操作,记录幂运算的梯度计算规则
MulBackward:3*x 操作,记录标量乘法的梯度计算规则
AddBackward (1):a + b 操作,记录加法的梯度计算规则
AddBackward (2):c + 1 操作(常数1不参与梯度计算)
2. 前向传播(Forward Pass)
在该过程中会创建计算图,同时,计算运算的输出张量,记录运算的元信息(如运算类型、输入张量、梯度函数),用于后续反向传播,以上代码中第3行就是前向传播。
3. 反向传播 (Backward Pass)
而在反向传播中,tensor variable需要缓存原来的tensor来计算反向传播梯度,如果想要计算各个variable的梯度,只需调用根节点variable的backward方法,autograd会自动沿着计算图反向传播,计算每一个叶子节点的梯度。
tensor.backward(gradient=None, retain_graph=None, create_graph=False, inputs=None)
主要有如下参数:
gradient:梯度初始值,当根节点是标量时,gradient可省略,当根节点是高维张量时,形状与variable一致,对于y.backward()。
retain_graph:是否保留计算图(支持多次反向传播),通常反向传播以后,计算图等相关中间结果会被释放清空,通过该参数可指定不清空,以用来多次反向传播。即复用已保留的计算图,再次计算梯度,新梯度与已有梯度累加。
create_graph:是否创建梯度的计算图(支持高阶导数),当该参数为False时,仅计算梯度值,不记录梯度的计算过程,无法对梯度再求导,当为True时,会构建梯度的计算图,允许对梯度进行二次求导(二阶导数)、三次求导(三阶导数)等高阶导数计算。
inputs:指定需要计算梯度的叶子节点(优化计算效率)。
当调用 y.backward() 时,会从输出张量y开始,沿计算图反向遍历,依次调用各操作的链式法则,最终把梯度累积到x.grad里。
y → AddBackward(2) → AddBackward(1) → ├── (常数1,无梯度)└── c → AddBackward(1) → ├── a → PowBackward → x└── b → MulBackward → x
根据链式法则,有:
∂y/∂x = ∂y/∂c * ∂c/∂x= ∂y/∂c * ∂c/∂a * ∂a/∂x + ∂y/∂c * ∂c/∂b * ∂b/∂x= 1 * 1 * (2x) + 1 * 1 * 3= 2*2 + 3 = 7
可以在之前的代码中增加验证:
y.backward() # 计算图在backward()后被销毁(除非retain_graph=True) print(x.grad) # 输出: tensor(7.)
需要说明的是:DAG在PyTorch中是动态构建的,每次前向传播都会重新创建,但在反向传播后会被自动销毁(除非指定retain_graph=True)。
2.2 关键机制与特性
1. 动态计算图(Dynamic Graph)
PyTorch的计算图是动态构建的:每次前向传播都会重新构建计算图,支持在运行时根据条件(如if、for)修改图结构,使得调试和修改模型变得更加容易。与TensorFlow 1.x 的静态图(计算图在开始执行之前构建完成,并且不会改变)不同,更灵活且易于调试,新版本的TensorFlow也已经支持动态图。
import torchx = torch.tensor(1.0, requires_grad=True) for i in range(3):y = x * 2if i % 2 == 0:y = x * 3 # 条件分支修改计算图 y.backward()print(x.grad) # 每次反向传播后梯度累积x.grad.zero_() # 清零梯度,避免累积
以上程序输出:
tensor(3.) tensor(2.) tensor(3.)
2. 梯度累积与清零
多次调用backward()会累积梯度(适用于大 batch 拆分训练),需通过.grad.zero_()手动清零梯度(否则会影响下一轮计算)。
3. 非叶子节点的梯度释放
中间节点(非叶子节点)的梯度在反向传播后会被自动释放,以节省内存。若需保留,可使用retain_grad()方法:
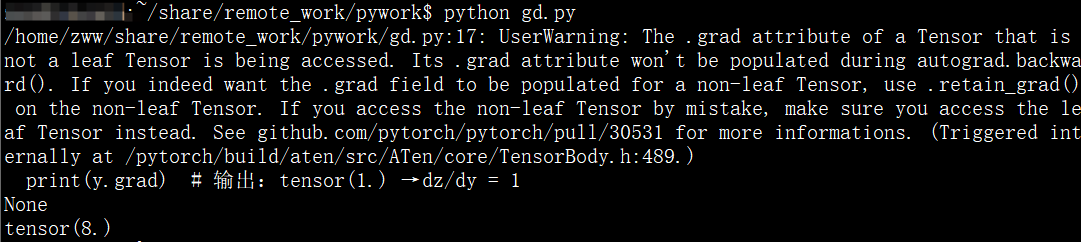
import torchx = torch.tensor(1.0, requires_grad=True) y = x * 4 y.retain_grad() # 保留y的梯度 z = y * 2 z.backward() print(y.grad) # 输出:tensor(1.) → dz/dy = 1 print(x.grad)
以上代码能正确输出结果,但是如果将y.retain_grad()这行注释掉,则会提示一下错误:
4. detach()方法
tensor.detach()会返回一个与原张量数据相同,但requires_grad=False的新张量,且脱离计算图,不再参与梯度传播:
x = torch.tensor(2.0, requires_grad=True) y = x.detach() # y.requires_grad=False,与计算图分离 z = y * 3 z.backward() # 报错:z不依赖任何requires_grad=True的张量
2.3 Function类:梯度计算的核心
autograd的梯度计算依赖Function类,每个运算(如加法、乘法)都对应一个Function子类,其中:
forward()方法:定义前向传播的计算逻辑;
backward()方法:定义反向传播的梯度计算逻辑(即局部梯度)。
当执行y = x * w时,autograd会隐式创建一个MulBackward(乘法对应的Function)实例,记录输入x、w,并在反向传播时调用其backward()方法计算梯度。
目前绝大多数函数都可以使用autograd实现反向求导,但如果需要自己写一个复杂的函数,不支持自动反向求导时,这时需写一个Function,实现它的前向传播和反向传播代码,示例代码如下:
import torch from torch.autograd import Functionclass MultiplyAdd(Function): @staticmethoddef forward(ctx, w, x, b): ctx.save_for_backward(w,x)output = w * x + breturn output@staticmethoddef backward(ctx, grad_output): w,x = ctx.saved_tensorsgrad_w = grad_output * xgrad_x = grad_output * wgrad_b = grad_output * 1return grad_w, grad_x, grad_b x = torch.ones(1) w = torch.rand(1, requires_grad = True) b = torch.rand(1, requires_grad = True) print(x, w, b) # 开始前向传播 z=MultiplyAdd.apply(w, x, b) # 开始反向传播 z.backward()# x不需要求导,中间过程还是会计算它的导数,但随后被清空 print(x.grad, w.grad, b.grad)
分析如下:
1. 自定义的Function需要继承autograd.Function,没有构造函数__init__,forward和backward函数都是静态方法;
2. backward函数的输出和forward函数的输入一一对应,backward函数的输入和forward函数的输出一一对应;
3. backward函数的grad_output参数即torch.autograd.backward中的gradient,w的梯度grad_w是上游梯度grad_output乘以 x(对w求导,d(output)/dw = x);求x的梯度grad_x,根据 x 是否需要求导(ctx.x_requires_grad),若需要,grad_x = grad_output * w(对 x 求导,d(output)/dx = w);否则为 None,上述实例中requires_grad默认为False,所以x梯度输出是None;对于b的梯度,grad_b = grad_output * 1,b 的梯度是上游梯度乘以 1(对 b 求导,d(output)/db = 1);
4. 如果某一个输入不需要求导,直接返回None,如forward中的输入参数x_requires_grad显然无法对它求导,直接返回None即可;
5. 反向传播可能需要利用前向传播的某些中间结果,需要进行保存,否则前向传播结束后这些对象即被释放。
参考
1. https://www.runoob.com/pytorch/pytorch-basic.html
2. https://blog.csdn.net/qq_43328040/article/details/108421469