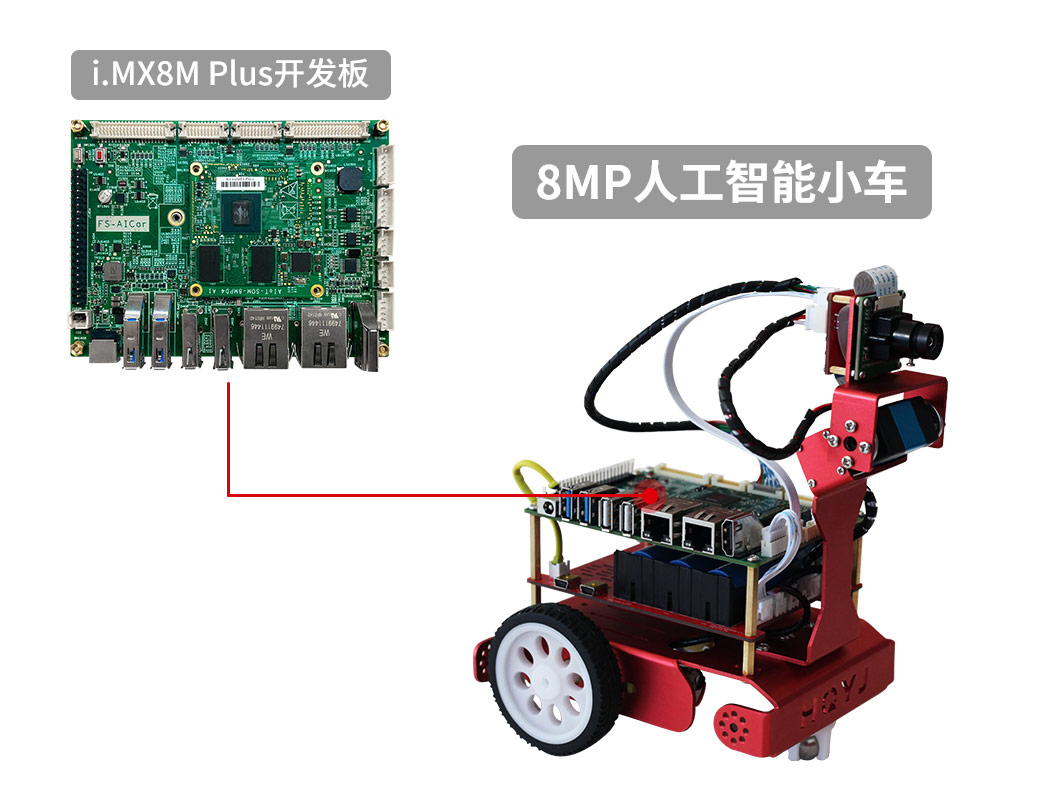
今天给大家分享一款人工智能AGV自主导航小车,该款小车主要是基于NXP i.MX8M Plus主控。i.MX8M Plus应用处理器是NXP推出的一款致力于推动机器学习(ML),机器视觉,多媒体与工业边缘物联网应用的工业人工智能芯片。拥有4个ARM Cortex-A53核心,主频可达1.8GHz,1个Cortex-M7核心,主频800,MHz,内部集成了神经网络加速单元(NPU),提供高达2.3TOPS的边缘计算能力,能够在工业和物联网等领域为边缘端的机器学习提供了强大的性能支撑。
该款小车充分发挥了i.MX8M Plus的高性能及边缘AI能力,把AGV 导航、视觉避障、颜色识别、防跌落等核心功能打包,还覆盖了 ROS、eIQ 模型训练、Xenomai 实时系统、Ubuntu 编译等关键技术,并录制了一套完整的课程《i.MX8M Plus开发与实践课程》。这套课程主要是面向工程师级别,含金量比较高,包含了实时Linux操作系统、人工智能、EtherCAT工业总线、多屏异显、多摄像头输入、ROS机器人操作系统、AGV自主导航智能车等众多前沿技术。
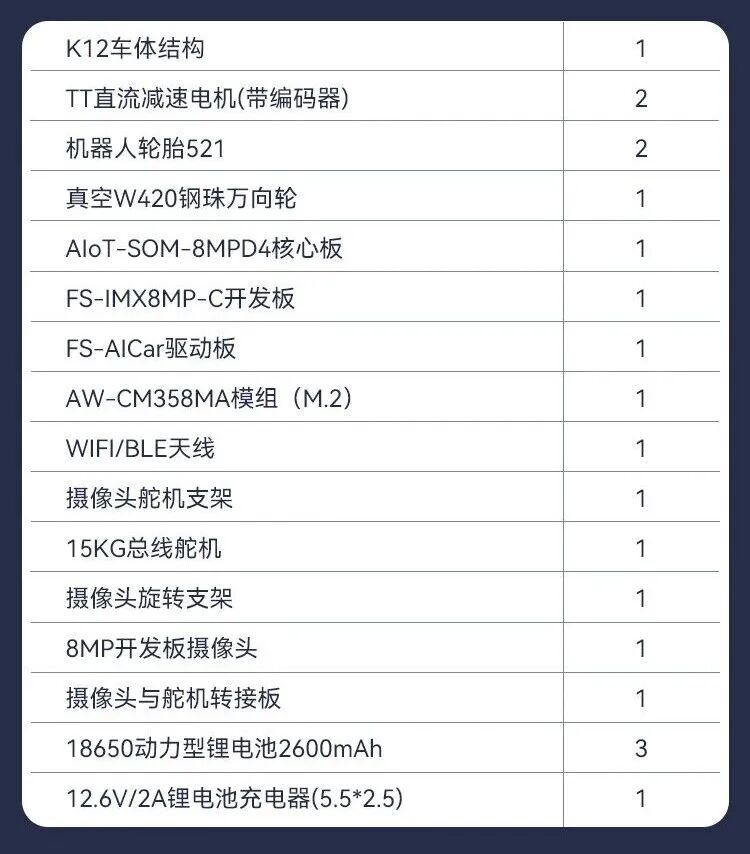
项目硬件清单
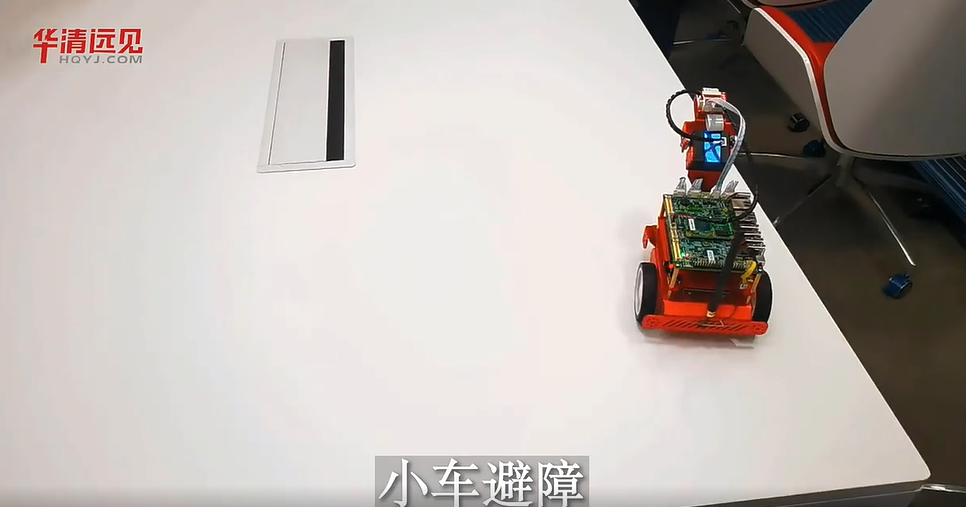
项目功能演示
FS-AICar人工智能机器人小车是以i.MX8M Plus为主控,OpenCV为图像处理库,以流行的jupter Lab为开发工具,Python为主要编程语言,使用elQ实现模型训练,然后部署到设备上,实现自动避障、物体跟随、颜色识别与追踪、防跌落等多种智能AI识别和硬件控制。以上均可在线编程控制,实时修改查看程序验证代码效果同步查看视频画面。
项目涉及技术点

项目实现逻辑

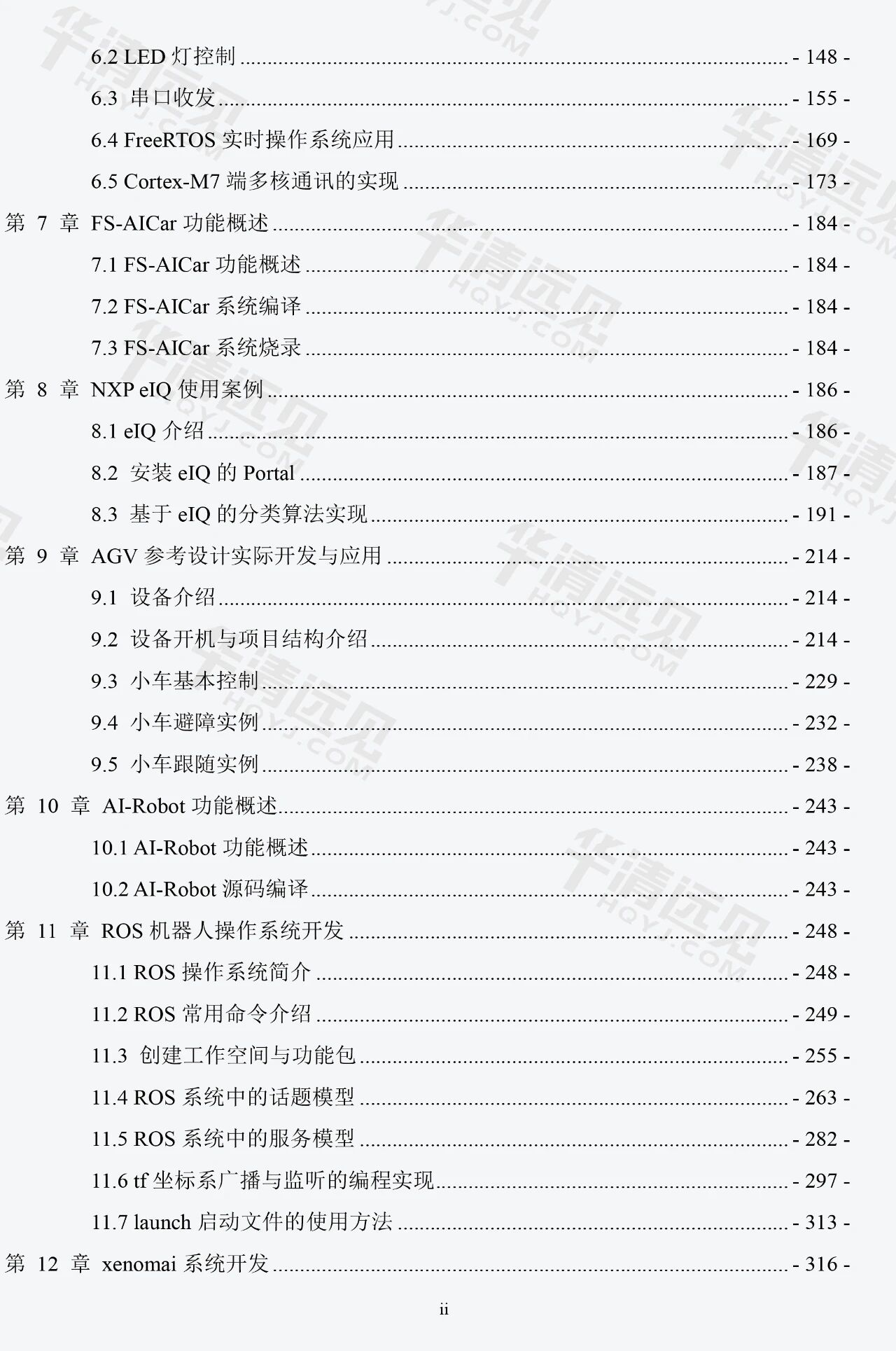
项目详细讲解

......
项目讲解比较长,这里就不一一去写了,完整版有需要的可以私我免费领取。